常见任务¶
概述¶
本节为无人机常见作业任务操作流程指引,聚焦航测、巡检、吊运三大核心飞行场景,系统梳理测参数配置、航线设计等关键操作步骤,同时明确各环节注意事项与风险要点。助力用户快速掌握标准化作业流程,高效开展合规飞行任务。
航测飞行¶
任务规划功能位于航点规划菜单中,提供完整的航测解决方案。支持通过KML文件导入已有规划区域,或在地图上手动绘制飞行区域,可自动生成满足航拍要求的航线,简化任务规划流程。


区域创建¶
任务规划首先需要确定飞行区域,可通过导入KML文件或手动绘制两种方式创建区域。
导入KML文件¶
如果已有规划好的飞行区域KML文件,可通过以下步骤快速导入:
-
在任务规划界面点击"导入KML"按钮
-
在弹出的文件选择对话框中选择KML格式的区域文件
-
确认导入后,系统将自动解析KML文件并在当前地图上显示区域边界
注意:
-
KML文件需包含有效的多边形或区域定义,确保文件格式正确
-
导入的KML区域将自动与地图坐标系匹配,系统会自动进行坐标转换
-
系统支持标准KML格式文件,建议使用标准的KML文件以确保兼容性
手动添加区域¶
对于需要现场规划的飞行区域,可通过手动绘制方式创建,操作步骤如下:
添加区域¶
在任务规划界面点击"添加区域"按钮,开始创建新的飞行区域。创建后可在区域管理列表中查看和管理。
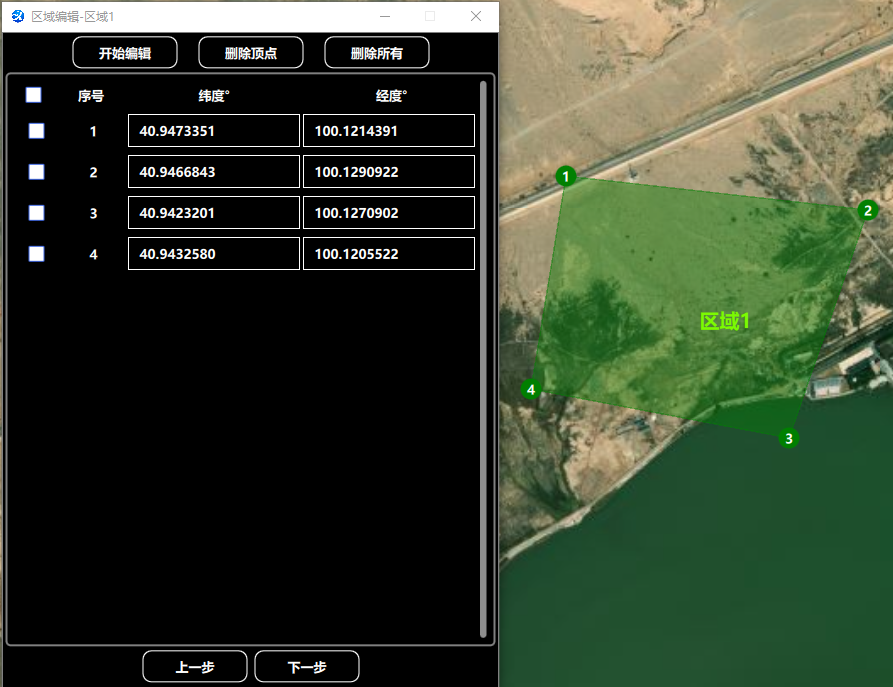
编辑区域边界¶
完成区域创建后,需要对区域边界进行精确编辑:
-
在区域管理界面,点击对应区域后面的编辑图标
-
进入区域编辑界面,点击"开始编辑"按钮激活编辑模式
-
在地图上通过鼠标左键逐次单击,确定区域的各个顶点位置
-
系统将自动连接各顶点形成闭合的多边形区域,实时显示区域预览
-
右键单击可退出当前顶点的绘制,完成编辑后点击"下一步"继续后续参数设置
参数设置¶
完成区域创建后,需要设置照相参数和航线参数,系统将根据这些参数自动生成最优航线。
照相参数设置¶
完成区域编辑后,进入照相参数设置界面,配置航拍任务的相关参数。照相参数直接影响航线的生成和最终的航拍效果。
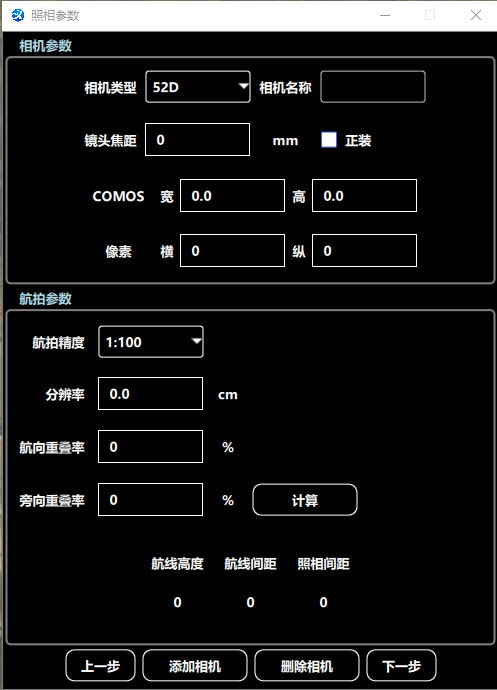
主要参数说明:
-
相机类型:从列表中选择使用的相机型号,系统会根据相机内置参数(如焦距、感光元件尺寸等)自动计算相关设置,确保航线生成准确
-
拍照模式:选择拍照触发方式,可选择等距拍照、等时间间隔拍照等模式,不同模式适用于不同的作业场景
-
重叠率:设置航拍照片的前向重叠率和旁向重叠率
-
前向重叠率:通常建议设置为70-80%,确保相邻照片有足够的重叠区域用于图像拼接
-
旁向重叠率:通常建议设置为60-70%,保证航线间的照片覆盖无遗漏
-
重叠率越高,生成的航点越多,作业时间越长,但图像拼接质量更可靠
-
注意:
-
重叠率是影响图像拼接质量的关键参数,需根据实际任务需求和后期处理要求合理设置
-
不同相机类型对应的参数设置选项可能有所差异,请根据实际使用的相机进行选择
-
重叠率设置过高会增加航点数量和作业时间,设置过低可能无法满足图像拼接要求
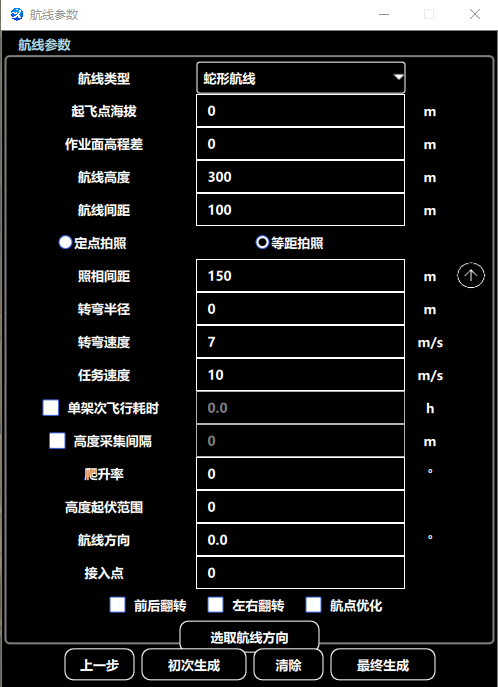
航线参数设置¶
完成照相参数配置后,进入航线参数设置界面,对生成的航线进行详细调整。航线参数决定了飞机的飞行路径、速度和高度等关键信息。
主要参数说明:
基础参数¶
-
航线类型:选择航线生成模式
-
蛇形航线:沿区域以"S"形路径飞行,适用于规则矩形区域,飞行路径连续、作业效率高
-
井字形航线:以网格形式规划航线,航线呈纵横交错分布,适合不规则区域或复杂地形的航拍任务
根据区域形状和任务需求选择合适的航线类型,规则区域优先选择蛇形航线,复杂区域建议选择井字形航线
-
-
起飞点海拔:填写实际起飞点的海拔高度(单位:米),用于计算航点的绝对高度和修正高度偏差
-
可通过GPS设备测量或从地图查询获取
-
准确的海拔高度有助于确保航线高度的准确性
-
-
作业面高程差:作业区域内最高点与最低点的海拔差值(单位:米)
-
用于系统判断地形起伏情况,辅助航线高度设置
-
地形起伏较大时,建议使用地形跟随功能或分段设置航线高度
-
高度与间距参数¶
-
航线高度:航线相对起飞点的飞行高度(单位:米)
-
这是所有航点的统一高度基准,系统会根据此高度生成航点
-
注意这是相对高度,实际飞行高度 = 起飞点海拔 + 航线高度
-
确保航线高度高于区域内所有障碍物,建议留有至少20-30米的安全余量
-
-
航线间距:相邻航线之间的距离(单位:米),根据相机参数和重叠率自动计算,也可手动调整
-
系统会根据相机视场角、飞行高度和重叠率自动计算最优间距
-
如需调整拍照密度,可手动修改航线间距
-
航线间距必须与重叠率参数匹配,否则可能无法满足图像拼接要求
-
-
高度起伏范围:允许实际飞行高度与设定航线高度的误差范围(单位:米)
-
用于适应地形起伏或风力影响导致的高度偏差
-
设置过小可能导致系统频繁调整高度,设置过大可能影响航拍精度
-
速度参数¶
-
任务速度:执行航拍任务时的前飞速度(单位:m/s)
-
影响作业时间:速度越快,完成作业所需时间越短
-
影响拍照质量:需确保速度与相机快门速度匹配,避免照片模糊
-
建议根据任务需求、风力条件和飞机性能设置,一般建议在5-15 m/s之间
-
-
转弯速度:航点间转弯时的前飞速度(单位:m/s)
-
转弯速度通常应低于任务速度,以确保转弯平稳
-
可根据飞机性能和转弯半径调整
-
-
高度采集间隔(必须勾选项):获取高程数据中的高度采集间隔(单位:米)
-
间隔参数距离采集高程数据一个点的高度
-
可根据地形和任务需要设置
-
转弯与方向参数¶
-
转弯半径:航点间转弯时的最小转弯半径(单位:米),影响航线的平滑度
-
转弯半径越大,航线越平滑,但会增加航线长度
-
转弯半径过小可能导致飞机转弯困难或航线不够平滑
-
需根据飞机性能和作业需求设置
-
-
航线方向:航线的主飞行方向,可手动设置,也可在生成的航线中直接选取
-
建议优先选择逆风方向,提高飞行稳定性
-
考虑地形起伏,选择坡度较小的方向
-
考虑光照条件,避免逆光拍摄影响图像质量
-
-
起始航点(接入点):设置航线的起始位置和方向
-
可选择区域的任意顶点或边缘作为起始点
-
建议选择距离起飞点较近的位置,减少往返时间
-
考虑风向因素,选择逆风方向开始有利于飞行安全
-
其他参数¶
-
爬升率:航点间爬升或下降时的最大垂直速度(单位:m/s)
-
用于限制飞机在高度变化时的垂直速度,确保飞行平稳
-
设置过小可能导致爬升过慢,设置过大可能影响飞行稳定性
-
用于“航点优化”的判断参数
-
-
高度起伏范围:相邻航点高度差小于此参数则只会生成一个航点
“爬升率”“高度起伏范围”参数仅在勾选“航点优化”时生效
-
航线方向:任务航线的飞行方向
-
前后翻转:生成的航线上下翻转
-
左右翻转:生成的航线左右翻转
注意:
-
参数匹配:航线参数应与照相参数相互匹配,特别是航线间距必须与重叠率参数匹配,确保生成的航线满足任务需求和图像拼接要求
-
速度设置:飞行速度的设置需综合考虑飞机性能、安全要求、风力条件和相机参数,速度过快可能导致照片模糊或遗漏,速度过慢会延长作业时间
-
高度安全:确保所有航点高度高于区域内最高障碍物,并留有足够的安全余量(建议至少20-30米),同时需符合当地无人机飞行高度的法规限制
-
预览检查:建议在确认所有参数后,先使用"初次生成"预览航线,检查航线路径是否合理、安全,确认无误后再进行"最终生成"
航线生成¶
完成所有参数设置后,系统将按照设置的参数自动生成航线。航线生成分为两个阶段:
初次生成与预览¶
点击"初次生成"按钮,系统将根据设置的参数自动生成过渡航线。此阶段生成的航线可用于预览和初步检查:
-
在地图上查看航线的完整路径和航点分布
-
检查航线覆盖范围是否符合任务要求
-
确认航线是否避开禁飞区、障碍物等安全限制区域
-
验证航线高度、间距等参数是否合理
如发现航线存在问题,可返回参数设置界面调整参数后重新生成。
最终生成与确认¶
确认过渡航线无误后,点击"最终生成"按钮,系统将生成完整的航线:
-
系统会根据设置的参数计算所有航点的精确坐标
-
生成完整的航点序列,包括起飞点、工作航点和降落点
-
生成的航线可在"航线上传"界面进行进一步编辑和调整
航线上传¶
航线生成完成后,需要将航线编辑并上传至飞控,才能用于实际飞行任务。
航线编辑¶
在航线上传界面,可以对自动生成的航线进行手动调整和优化:
-
航点编辑:支持添加、删除、移动航点,精确调整航线路径
-
参数修改:可以单独修改每个航点的飞行高度、速度等参数,适应特殊需求
-
安全检查:再次确认航线是否避开建筑物、高压线、禁飞区等障碍物和安全限制区域
航线上传¶
确认航线编辑无误后,执行航线上传操作:
-
点击"上传"按钮,系统将开始上传航线至飞控
-
上传前系统会自动进行航线合法性检查,验证航线参数是否符合安全要求
-
上传成功后,航线将保存至飞控,可在后续的自主飞行任务中调用执行
注意:
-
上传前请务必仔细检查航线,确保所有参数正确无误
-
上传过程中请保持与飞控的通信连接稳定
-
上传成功后建议通过"下传"功能验证航线上传是否正确
其他注意事项请参考《5.4.1 任务规划》
巡检飞行¶
任务规划功能位于航点规划菜单中,提供完整的巡检解决方案。支持通过KML文件导入已有规划区域,或在地图上手动绘制飞行区域,可自动生成满足航拍要求的航线,简化任务规划流程。
区域创建¶
任务规划首先需要确定飞行区域,可通过导入KML文件或手动绘制两种方式创建区域。
导入KML文件¶
如果已有规划好的飞行区域KML文件,可通过以下步骤快速导入:
-
在任务规划界面点击"导入KML"按钮
-
在弹出的文件选择对话框中选择KML格式的区域文件
-
确认导入后,系统将自动解析KML文件并在当前地图上显示区域边界
注意:
-
KML文件需包含有效的多边形或区域定义,确保文件格式正确
-
导入的KML区域将自动与地图坐标系匹配,系统会自动进行坐标转换
-
系统支持标准KML格式文件,建议使用标准的KML文件以确保兼容性
手动添加区域¶
对于需要现场规划的飞行区域,可通过手动绘制方式创建,操作步骤如下:
添加区域¶
在任务规划界面点击"添加区域"按钮,开始创建新的飞行区域。创建后可在区域管理列表中查看和管理。
编辑区域边界¶
完成区域创建后,需要对区域边界进行精确编辑:
-
在区域管理界面,点击对应区域后面的编辑图标
-
进入区域编辑界面,点击"开始编辑"按钮激活编辑模式
-
在地图上通过鼠标左键逐次单击,确定区域的各个顶点位置
-
系统将自动连接各顶点形成闭合的多边形区域,实时显示区域预览
-
右键单击可退出当前顶点的绘制,完成编辑后点击"下一步"继续后续参数设置
参数设置¶
完成区域创建后,需要设置照相参数和航线参数,系统将根据这些参数自动生成最优航线。
照相参数设置¶
完成区域编辑后,进入照相参数设置界面,配置航拍任务的相关参数。照相参数直接影响航线的生成和最终的航拍效果。
主要参数说明:
-
相机类型:从列表中选择使用的相机型号,系统会根据相机内置参数(如焦距、感光元件尺寸等)自动计算相关设置,确保航线生成准确
-
拍照模式:选择拍照触发方式,可选择等距拍照、等时间间隔拍照等模式,不同模式适用于不同的作业场景
-
重叠率:设置航拍照片的前向重叠率和旁向重叠率
-
前向重叠率:通常建议设置为70-80%,确保相邻照片有足够的重叠区域用于图像拼接
-
旁向重叠率:通常建议设置为60-70%,保证航线间的照片覆盖无遗漏
-
重叠率越高,生成的航点越多,作业时间越长,但图像拼接质量更可靠
-
注意:
-
重叠率是影响图像拼接质量的关键参数,需根据实际任务需求和后期处理要求合理设置
-
不同相机类型对应的参数设置选项可能有所差异,请根据实际使用的相机进行选择
-
重叠率设置过高会增加航点数量和作业时间,设置过低可能无法满足图像拼接要求
航线参数设置¶
完成照相参数配置后,进入航线参数设置界面,对生成的航线进行详细调整。航线参数决定了飞机的飞行路径、速度和高度等关键信息。
主要参数说明:
基础参数¶
-
航线类型:选择航线生成模式
-
蛇形航线:沿区域以"S"形路径飞行,适用于规则矩形区域,飞行路径连续、作业效率高
-
井字形航线:以网格形式规划航线,航线呈纵横交错分布,适合不规则区域或复杂地形的航拍任务
根据区域形状和任务需求选择合适的航线类型,规则区域优先选择蛇形航线,复杂区域建议选择井字形航线
-
-
起飞点海拔:填写实际起飞点的海拔高度(单位:米),用于计算航点的绝对高度和修正高度偏差
-
可通过GPS设备测量或从地图查询获取
-
准确的海拔高度有助于确保航线高度的准确性
-
-
作业面高程差:作业区域内最高点与最低点的海拔差值(单位:米)
-
用于系统判断地形起伏情况,辅助航线高度设置
-
地形起伏较大时,建议使用地形跟随功能或分段设置航线高度
-
高度与间距参数¶
-
航线高度:航线相对起飞点的飞行高度(单位:米)
-
这是所有航点的统一高度基准,系统会根据此高度生成航点
-
注意这是相对高度,实际飞行高度 = 起飞点海拔 + 航线高度
-
确保航线高度高于区域内所有障碍物,建议留有至少20-30米的安全余量
-
-
航线间距:相邻航线之间的距离(单位:米),根据相机参数和重叠率自动计算,也可手动调整
-
系统会根据相机视场角、飞行高度和重叠率自动计算最优间距
-
如需调整拍照密度,可手动修改航线间距
-
航线间距必须与重叠率参数匹配,否则可能无法满足图像拼接要求
-
-
高度起伏范围:允许实际飞行高度与设定航线高度的误差范围(单位:米)
-
用于适应地形起伏或风力影响导致的高度偏差
-
设置过小可能导致系统频繁调整高度,设置过大可能影响航拍精度
-
速度参数¶
-
任务速度:执行航拍任务时的前飞速度(单位:m/s)
-
影响作业时间:速度越快,完成作业所需时间越短
-
影响拍照质量:需确保速度与相机快门速度匹配,避免照片模糊
-
建议根据任务需求、风力条件和飞机性能设置,一般建议在5-15 m/s之间
-
-
转弯速度:航点间转弯时的前飞速度(单位:m/s)
-
转弯速度通常应低于任务速度,以确保转弯平稳
-
可根据飞机性能和转弯半径调整
-
转弯与方向参数¶
-
转弯半径:航点间转弯时的最小转弯半径(单位:米),影响航线的平滑度
-
转弯半径越大,航线越平滑,但会增加航线长度
-
转弯半径过小可能导致飞机转弯困难或航线不够平滑
-
需根据飞机性能和作业需求设置
-
-
航线方向:航线的主飞行方向,可手动设置,也可在生成的航线中直接选取
-
建议优先选择逆风方向,提高飞行稳定性
-
考虑地形起伏,选择坡度较小的方向
-
考虑光照条件,避免逆光拍摄影响图像质量
-
-
起始航点(接入点):设置航线的起始位置和方向
-
可选择区域的任意顶点或边缘作为起始点
-
建议选择距离起飞点较近的位置,减少往返时间
-
考虑风向因素,选择逆风方向开始有利于飞行安全
-
其他参数¶
-
爬升率:航点间爬升或下降时的最大垂直速度(单位:m/s)
-
用于限制飞机在高度变化时的垂直速度,确保飞行平稳
-
设置过小可能导致爬升过慢,设置过大可能影响飞行稳定性
-
用于“航点优化”的判断参数
-
-
高度起伏范围:相邻航点高度差小于此参数则只会生成一个航点
“爬升率”“高度起伏范围”参数仅在勾选“航点优化”时生效
-
航线方向:任务航线的飞行方向
-
前后翻转:生成的航线上下翻转
-
左右翻转:生成的航线左右翻转
注意:
-
参数匹配:航线参数应与照相参数相互匹配,特别是航线间距必须与重叠率参数匹配,确保生成的航线满足任务需求和图像拼接要求
-
速度设置:飞行速度的设置需综合考虑飞机性能、安全要求、风力条件和相机参数,速度过快可能导致照片模糊或遗漏,速度过慢会延长作业时间
-
高度安全:确保所有航点高度高于区域内最高障碍物,并留有足够的安全余量(建议至少20-30米),同时需符合当地无人机飞行高度的法规限制
-
预览检查:建议在确认所有参数后,先使用"初次生成"预览航线,检查航线路径是否合理、安全,确认无误后再进行"最终生成"
航线生成¶
完成所有参数设置后,系统将按照设置的参数自动生成航线。航线生成分为两个阶段:
初次生成与预览¶
点击"初次生成"按钮,系统将根据设置的参数自动生成过渡航线。此阶段生成的航线可用于预览和初步检查:
-
在地图上查看航线的完整路径和航点分布
-
检查航线覆盖范围是否符合任务要求
-
确认航线是否避开禁飞区、障碍物等安全限制区域
-
验证航线高度、间距等参数是否合理
如发现航线存在问题,可返回参数设置界面调整参数后重新生成。
最终生成与确认¶
确认过渡航线无误后,点击"最终生成"按钮,系统将生成完整的航线:
-
系统会根据设置的参数计算所有航点的精确坐标
-
生成完整的航点序列,包括起飞点、工作航点和降落点
-
生成的航线可在"航线上传"界面进行进一步编辑和调整
航线上传¶
航线生成完成后,需要将航线编辑并上传至飞控,才能用于实际飞行任务。
航线编辑¶
在航线上传界面,可以对自动生成的航线进行手动调整和优化:
-
航点编辑:支持添加、删除、移动航点,精确调整航线路径
-
参数修改:可以单独修改每个航点的飞行高度、速度等参数,适应特殊需求
-
安全检查:再次确认航线是否避开建筑物、高压线、禁飞区等障碍物和安全限制区域
航线上传¶
确认航线编辑无误后,执行航线上传操作:
-
点击"上传"按钮,系统将开始上传航线至飞控
-
上传前系统会自动进行航线合法性检查,验证航线参数是否符合安全要求
-
上传成功后,航线将保存至飞控,可在后续的自主飞行任务中调用执行
注意:
-
上传前请务必仔细检查航线,确保所有参数正确无误
-
上传过程中请保持与飞控的通信连接稳定
-
上传成功后建议通过"下传"功能验证航线上传是否正确
其他注意事项请参考《5.4.1 任务规划》
吊运飞行¶
作业前准备¶
任务评估¶
-
确认吊运货物详细参数:核算货物重量、测量外形尺寸,明确重心位置,严格遵循“单次吊运重量不得超过飞行器最大载荷的80%”原则,杜绝超载作业。
-
严格检查气象条件:作业期间风速需控制在5m/s以内,能见度不低于1km,无雷雨、冰雹、强对流等恶劣天气。
设备检查¶
-
飞行器检查:地面检查发动机系统各部件连接正常,螺旋桨无变形、裂纹及松动,舵机系统响应灵敏、行程正常;检查电池(或燃油)储量充足,飞控系统姿态、定位正常,无故障报警,通信系统信号稳定。
-
吊挂系统检查:排查绳索、挂钩、吊挂架,确认无磨损、断丝、锈蚀或断裂,连接部位紧固无松动;检查吊挂系统承重性能,确保符合本次吊运载荷要求。
场地勘查¶
-
检查起降区:确保起降区域平整、坚实,无杂物、凸起物,面积满足飞行器起降需求,避免地面松软导致起飞时侧翻或着陆时磕碰设备。
-
核查吊运路径:全程确认吊运路径无障碍物(如树木、建筑物、高压线路等),路径两侧预留安全距离,避免货物摆动时发生碰撞。
-
确认投放区域:投放点地面平整、无人员逗留,无易燃易爆、易碎物品,划定安全警戒区,安排专人值守,禁止无关人员进入作业区域。
航线规划¶
-
结合作业区域地形、障碍物分布,在地面站软件上规划合理航线,优先选择开阔、无遮挡、气流稳定的路线,避免低空穿越复杂地形。
-
航线需设置明确航点,标注起降点、吊运起点、投放点及应急备降点,确保任务飞行时地面站软件操作人员按计划操作,避免偏离路线;货物高度需高于路径内最高障碍物至少20米,防止碰撞。
提示:
吊运缆绳建议采用“机体四点连接、货物单点连接”方式,四点连接需确保受力均匀,避免单侧受力导致飞行器倾斜;缆绳长度需合理规划,结合作业高度及货物尺寸,避免过短导致气流扰动货物,过长影响飞机姿态的控制。
吊运操作步骤¶
空载测试¶
-
操作员通过遥控器切换至手动模式,启动飞行器缓慢起飞,观察飞行器姿态,确保无异常晃动。
-
起飞后切换至增稳模式,操控飞行器上升至脱离地效高度,保持悬停,持续观察30秒,确认飞行器姿态稳定、飞控信号正常,遥控器响应正常。
-
测试完成后,操控飞行器降落至起降区,关闭发动机,再次检查飞行器状态。
试吊测试¶
-
将吊挂系统与货物牢固连接,确认连接无误、货物重心居中后,飞控操作员采用手动或增稳模式缓慢起飞,保持姿态稳定。
-
飞行器稳定后切换至增稳模式,手动操作遥控器,缓慢移动飞行器至货物正上方,确保挂钩与货物吊点对齐,避免偏移导致货物倾斜。
-
缓慢垂起爬升,严格控制货物起吊初速度,建议不大于0.3m/s;起吊过程中,全程观察油门、总距及飞行器姿态显示,发现异常立即停止起吊。
-
当货物离地1米时,停止爬升,保持悬停状态30秒,地面人员观察货物稳定性(无剧烈摆动)、吊挂系统连接情况,地面站操作员观察飞行器姿态是否平稳、地面站软件显示各项信息是否正常,确认无异常后继续操作。
空中运输¶
-
试吊无异常后,保持飞行器悬停状态,遥控器切换至自主模式,飞行器将按照预设航点自主飞行,全程无需手动操控(如需控制,可切换至增稳模式)。
-
空中运输期间,飞控操作员全程监控飞控系统各项参数(姿态、速度、油门、总距、通信信号等),地面指挥员全程观察飞行路线及货物状态,发现风速骤增、货物异常摆动、飞控信号中断等情况,立即切换至手动模式,操控飞行器就近备降,排查隐患。
精准投放¶
-
飞行器飞行至投放点正上方后,飞控操作员切换至增稳模式,缓慢降低飞行高度,同时地面人员拉动导引绳(若有),控制货物摆动,避免货物碰撞地面或周边物体。
-
投放时,严格遵循“先接触地面再松钩”原则,缓慢降低飞行器高度,让货物平稳接触地面,确认货物落地稳定、无滑动后,再操作松钩,避免货物未落地松钩导致摔坏、砸伤。
-
松钩后,操控飞行器缓慢上升,脱离投放区域,切换至自主模式或手动模式,飞回起降区,平稳降落。
注意:
作业过程中若出现飞行器姿态失控、货物脱落等突发情况,飞控操作员立即切换至手动模式,优先保障人员安全(可选在合适的地方抛掉货物),操控飞行器就近备降。