地面调试¶
概述¶
本章是无人机地面调试的主要内容,涵盖从建立通信到地面调试完成的全过程,本章节介绍了建立通信、参数检查确认、遥控器检查、舵面调整、油门调整、逻辑确认等关键环节。
建立通信¶
调试版地面站与通用版地面站支持单独连接与同时连接两种使用模式,但在地面调试阶段需要同时连接通用版地面站和调试版地面站,方便进行数据观察。
通用版地面站通信连接参考《5.1 通信配置》章节描述。
调试版地面站连接¶
当需同时使用通用版地面站和调试版地面站时,需启用数据共享功能,具体操作步骤如下:
- 打开通用版地面站,在正常连接的基础上,打开共享界面,填入对应的 “IP地址、端口号”,并开启共享;
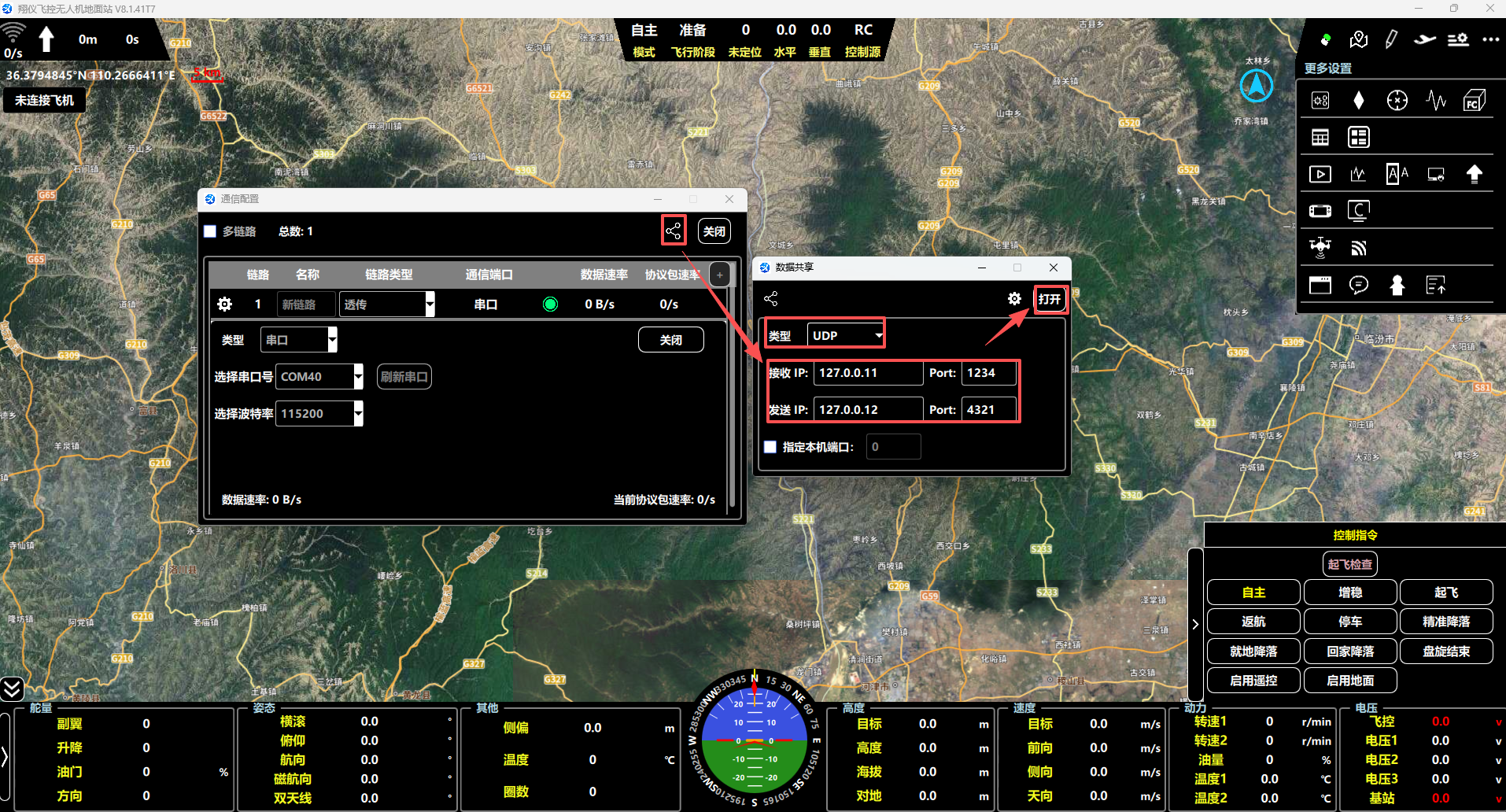
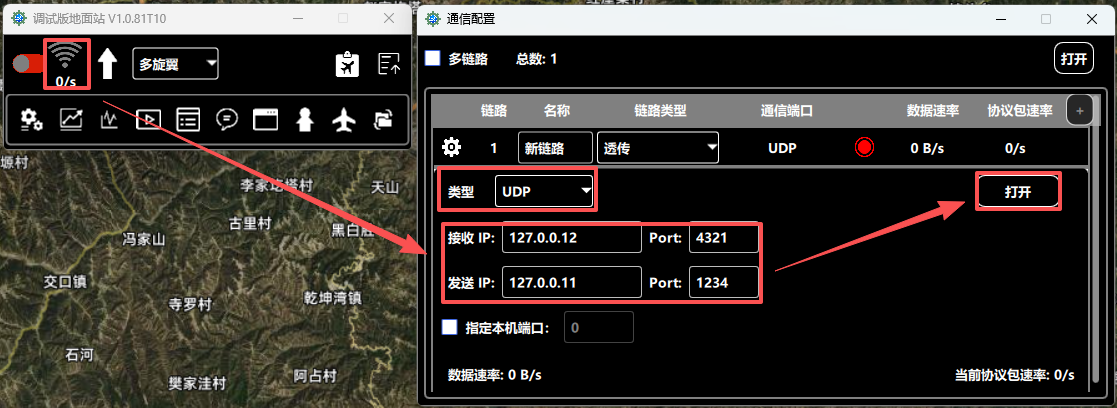
- 打开调试版地面站,点击左上角 wifi 图标,弹出通信口配置界面,端口类型选择“UDP”,填入对应的 “IP地址、端口号” ,并 “打开” ,即可实现与通用版地面站的数据共享。
如需单独连接调试版地面站软件,请参考《6.1 通信连接》章节描述。
参数检查确认¶
在地面调试阶段,参数检查确认是保障后续飞行安全与稳定性的必要环节,需围绕硬件配置、飞行控制逻辑、应急保障等维度,逐一核对参数与实际机型、任务需求的匹配性,具体内容如下:
安装参数检查¶
安装参数直接关联飞控与机体的物理适配性,需结合飞机实际安装位置、硬件布局逐一校准,是地面调试的关键环节:
-
安装方向与中位校准
-
飞控安装指向:在“参数配置-安装参数-安装位置”中,Y轴、Z轴设置需与实际飞机一致,调整后需验证:飞机低头时地面站“俯仰角”显示负值,抬头为正值;左滚时“横滚角”为负值,右滚为正值,确保姿态反馈与实际动作一致。
-
安装中位修正:飞机平稳放置于水平地面(机体完全水平),调整“横滚中位”“俯仰中位”参数,使地面站姿态显示误差控制在±2°以内;若机械安装倾斜过大(如机架变形),需优先修正机械结构,而非依赖参数补偿(避免减弱减震效果)。
-
磁罗盘:在“参数配置-安装参数-多余度”中,磁罗盘安装需与机体正交水平,Y轴、Z轴设置需与实际飞机一致,调整后需验证:飞机左转时“磁航向”减小,右转时增大; 磁偏角默认设为0,后续通过实地测试补充精确值。

-
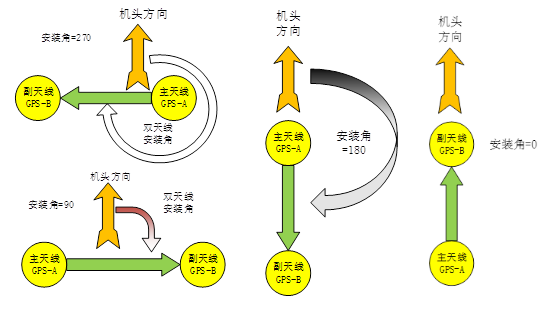
双天线:若配备双天线,“双天线安装角”需按实际测量值填写,主天线位置需作为GPS坐标修正的基准。
-
-
坐标修正
-
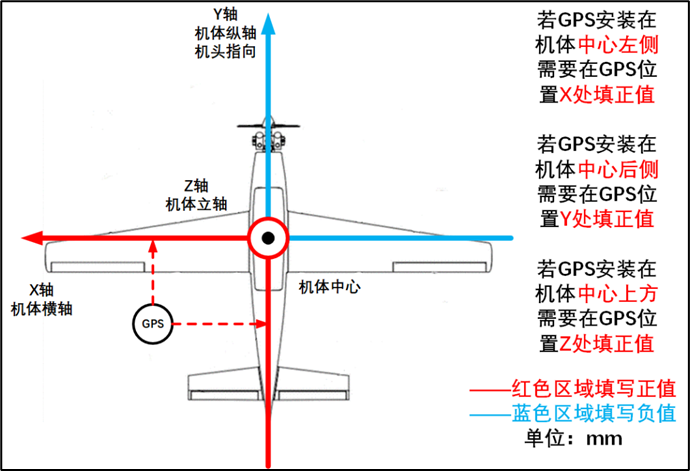
IMU坐标:以机体中心为原点,X轴左侧为正、右侧为负;Y轴后方为正、前方为负;若飞控偏离机体中心≤50cm,可填0(无需修正),超出则按实际距离填写(单位:mm)。
-
卫导(GPS)坐标:X轴左侧为正、右侧为负;Y轴后方为正、前方为负;Z轴上方为正、下方为负;双天线系统需确保主/备天线位置相近,共用同一补偿参数,避免切换时姿态波动。

-
-
输出配置
-
矩阵:在“矩阵配置”中,各矩阵(fz/mx/my/mz)参数需与机型旋翼布局匹配(如六旋翼、八旋翼),请联系翔仪技术人员确认。
-
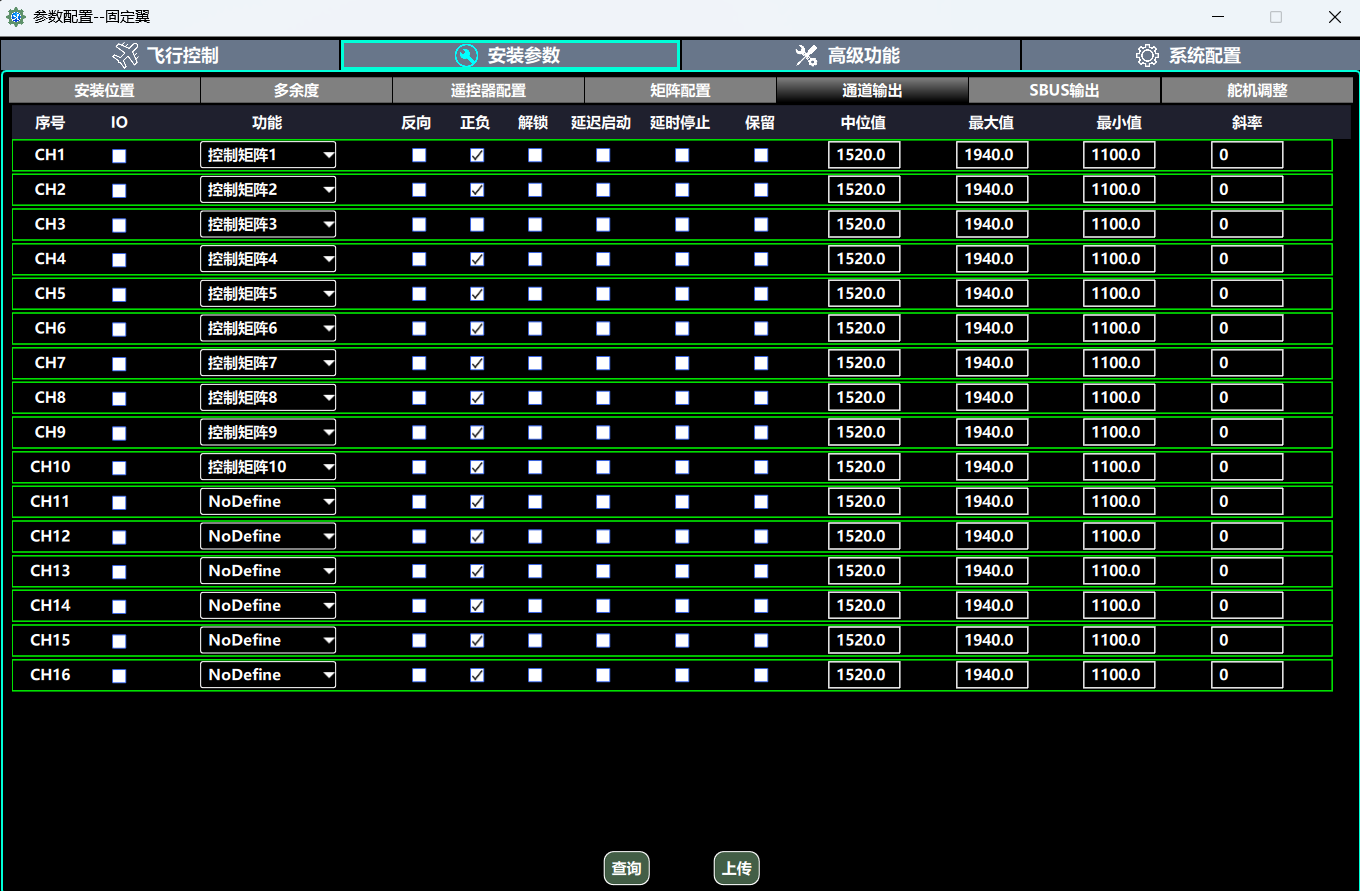
通道输出:在“通道输出”“SBUS输出”中,通道功能(如CH1-6对应控制矩阵1-6)需与实际接线一致,电机默认不勾选“反向/正负”,舵机需勾选“正负”,若有其他特殊需求请联系翔仪技术人员。
-
详细参数说明《6.3.2 安装参数》章节。
飞行参数检查¶
飞行参数决定飞机的飞行性能与控制逻辑,需结合机型动力、任务场景(如飞行速度、爬升率、下降率等)调整,具体包括:
-
基础控制参数
- 控制参数:在“参数配置-飞行控制-控制参数”中,保持默认,请联系翔仪技术人员确认。
-
飞机性能参数
- 飞行极限:在“参数配置-飞行控制-飞机性能”中,“飞行极限”栏参数需按实际需求设置,避免超出机型物理极限。
-
油门参数与飞行模式
-
油门参数:在“油门参数”界面中,保持默认。
-
飞行模式:“飞行模式”界面中,“飞行参数”保持默认。“其他参数”保持默认勾选项,需了解详细控制逻辑后勾选。
-
-
应急参数
-
故障处理逻辑:“应急参数”界面中,“定位故障”“链路故障”的“处理方式”(如“自动返航”“继续任务”)、“判断时间”(如5s,持续故障判定时长)、“恢复时间”(如1s,故障恢复判定时长)、“干预时间”(如30s,超时执行应急操作)需按飞行环境设置。
-
其他参数:根据实际情况填写。
-
详细参数说明《6.3.1 飞行控制》章节。
遥控器检查¶
遥控器数据检查¶
联通性检查¶
开启遥控器时,请留意接收机的状态,确保其指示灯闪烁正常。同时,检查地面站软件左侧区域,确认无“遥控器”的异常提示信息。
摇杆值检查¶
请按照以下步骤检查摇杆的正反向、中立位和行程是否符合要求:
-
副翼摇杆:最左为-100,中立为0,最右为100。
-
升降摇杆:前推为-100,中立为0,拉杆为100。
-
油门摇杆:最低为-100,中间为0,最高为100。
-
方向摇杆:最左为-100,中立为0,最右为100。
-
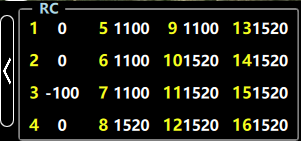
其他三挡开关:检查对应通道值是否在-100(1100)、0(1520)和100(1940)之间正常变化。
模式切换开关检查¶
拨动模式切换开关(通道6),观察飞行模式是否能够正常进行切换,以此确保遥控器对飞行模式的控制功能正常。
| 通道号 | RC值 | 对应飞行模式 |
|---|---|---|
| RC 6 | -100 | 手动模式 |
| RC 6 | 0 | 增稳模式 |
| RC 6 | 100 | 自主模式 |
遥控器设置调整¶
反向调整¶
某个摇杆的方向和上述描述不符,遥控器通道反向菜单(REVERSE菜单)将对应通道反向。
行程与中立值校准¶
若某个摇杆的行程范围并非在1100 - 1940之间,或者中立值不是1520,请利用遥控器自带的校准功能对摇杆进行校准。
若遥控器不具备自校准功能,则可通过调整遥控器的行程极限(通常在END POINT菜单中操作)来满足行程要求,通过调整通道微调(一般在SUB TRIM菜单中操作)来满足中立位要求。
特殊调整¶
建议使用 Futaba 品牌 T8 及以后系列的 遥控器产品,市场使用广泛。
若遥控器特殊,修改遥控器本身设置无法满足飞控要求,可以调整飞控的“遥控器参数”适配遥控器,支持通道正反向、中立位及行程范围调整。
“遥控器参数”是针对特定遥控器进行设置的。如果更换了遥控器,原有的参数可能不适用于新设备。因此,不建议通过修改飞控的“遥控器参数”来解决兼容性问题。
舵面调整¶
调试前准备¶
-
明确舵机的控制接口类型,如PWM、CAN、RS422等。
-
若为 PWM 控制舵机,需提前明确舵机的控制频率、控制脉宽等参数。
-
若为 CAN/RS422 等其他接口,需提前明确舵机的控制 ID、控制频率、波特率等参数。
-
-
舵机接线定义看参考《1 系统使用》章节相关描述。
-
舵机安装时,需保证舵面处于中立位附近、舵机位于行程中位附近,避免因舵机左右行程不均,导致标定时舵面角度无法达到要求。
此处仅以PWM控制接口为例,舵面标定支持通过遥控器、地面站飞行摇杆操作两种方式。
遥控器标定¶
-
打开“安装参数-通道输出”界面,将实际连接舵机的通道配置为对应矩阵通道,并勾选该通道的“正负”选项。
-
通过遥控器将飞行模式切为手动模式,在准备阶段开展标定:
-
遥控器摇杆保持中立,标定舵面中位,修改对应通道的中位PWM值;
-
打舵检查舵面作动方向,若方向相反则勾选“反向”;
-
打舵确认舵面最大 / 最小偏转行程,若不合适则调整对应通道最大值、最小值。
-
地面站标定¶
-
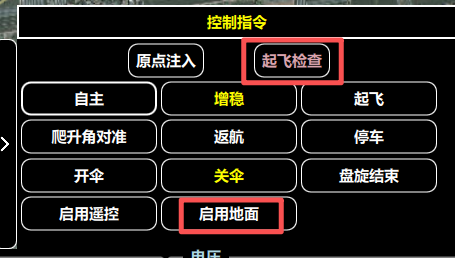
通用版地面站右下角先点击“启用地面”,待顶部控制源显示为“GS”后,再点击“起飞检查”。
-
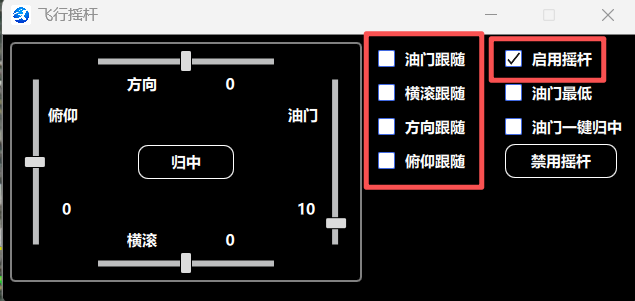
进入“舵机检查”界面,勾选“使用地面站进行检查”并点击“打开飞行摇杆”,勾选界面“启用摇杆”,再在起飞检查界面点击“手动”,地面站刘海控制源变为“bar”、模式为“手动”即可开始标定。
-
标定过程中不可关闭飞行摇杆及起飞检查界面,否则会自动退出手动模式。
-
飞行摇杆界面需要取消勾选“油门、横滚、方向、俯仰跟随”,并勾选“启用摇杆”。
-
控制源变为“bar”后,点击“手动”切换模式。


-
-
舵面具体调整步骤与遥控器标定流程一致。
油门调整¶
电动电调校准¶
-
电调信号线接到飞控的油门通道
-
将遥控器油门推至最大,电调上电;
-
听到电调校准声音,遥控器油门拉至最低;
-
校准完成后,在该模式下轻推油门,检查电机转向。
注意:
-
若电调行程范围需要修改,则使用飞控修改后再进行校准;
-
建议在不带桨叶的状态下进行校准;
-
转向相反时,应断电后任意调换电调三相线其中两根;
-
不同电机校准方法可能不同;
-
电机上电之后状态不对,可能的原因:
-
慢响,通道接错/未接;
-
快响,油门没在最低;
-
上电无信号,电调可能需要供 5v 驱动电;
以上若不能解决问题,可联系电调厂家进行咨询。
-
油动油门标定¶
-
在调试版软件,“飞行性能”→“油门参数”界面,取消勾选“需要解锁”
-
确保左侧异常栏无遥控器异常提示;
-
检查当前模式为 RC-手动模式;
-
遥控器油门杆最高时,风门应最大,若没有最大,在通道参数中调节油门对应通道脉宽范围
-
遥控器油门杆最高时,风门应关闭,若没有关闭,在通道参数中调节油门对应通道脉宽范围
注意:
- 遥控器正常连接且将油门摇杆置于最低位,轻推油门摇杆进行小幅操作,防止舵机卡舵
逻辑确认¶
本测试为无人机地面调试最终环节,用于校验舵机接线顺序、飞控配置参数的正确性,验证整机控制逻辑的合理性,为后续安全起飞提供基础保障。测试前必须断开动力电/开关。
-
将无人机放置于水平地面,舵机系统上电;
-
将遥控器切换至手动模式,操作遥控器各通道打杆,观察各舵机的响应逻辑是否正常、动作是否连贯;
-
切换遥控器至增稳模式,分别移动飞控执行俯仰、横滚、航向姿态动作,观察舵机输出的修正量是否为对应姿态的纠正修正量,确保修正逻辑正确。
空速、振动测试¶
测试目的¶
检查空速测量是否正常,验证不同油门档位下动力系统对空速测量的影响,同时监测各油门阶段机体振动状态。
测试前准备¶
-
确认油门矩阵、通道配置无误,完成电机转向核对或发动机油门标定,机体整备至最终飞行状态;
-
将飞行器转运至测试场地,并将机体可靠固定于测试架。
空速测试¶
空速测量检查¶
-
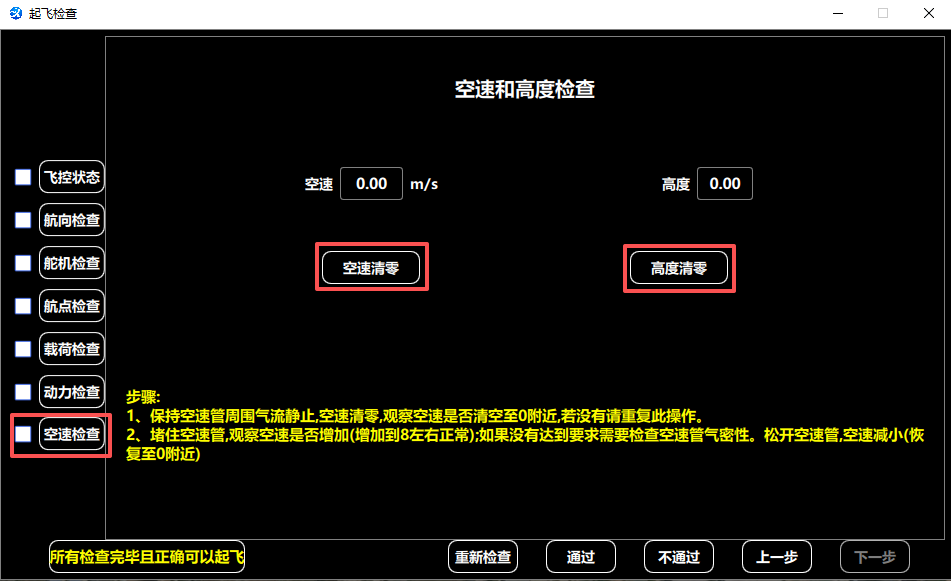
打开“起飞检查”界面,点击“空速检查”,持空速管周边气流静止(可遮挡空速管或采用适配容器罩住空速管),在地面站执行“空速清零”和“高度清零”,观察空速值是否归零至 0 附近,若未归零可重复上述操作。
-
空速清零后封堵空速管,观察空速值是否上升至 8 以上;持续封堵时空速应保持稳定,松开后空速应迅速回落至 0 附近,满足以上条件即判定空速测量正常,可开展后续测试。
-
若封堵空速管后空速无上升,需检查空速管是否有堵塞或漏气。
-
若封堵空速管后空速可上升,但持续封堵后数值逐渐下降,需检查空速管气密性,排查漏气点
-
地面动力测试¶
-
确认桨叶安装方向正确;
-
启动动力系统,在地面可实现的油门范围内,全油门区间推油测试:
- 观察推油过程中发动机 / 电机振动是否处于合格范围(振动监测界面数值不超过底色阈值);
-
同步观察空速波动情况,正常波动范围应≤3。