高级应用¶
概述¶
本章提供了无人机在复杂任务场景下的增强功能,这些功能旨在扩展无人机的应用范围,提高任务执行效率和安全性,满足专业用户的高级需求。
多机信息¶
多机信息显示界面在更多设置中打开。

可显示当前地面站软件上连接的所有无人机的状态和异常信息。如果某无人机存在异常,也会在左侧变红提示。
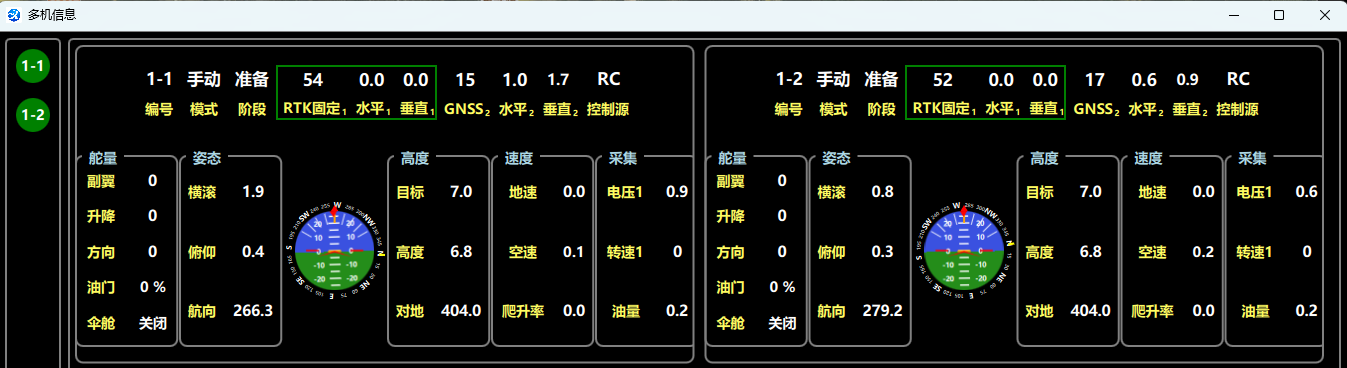
使用提示:
-
双击“多机信息”界面的仪表盘,可将主界面切换为此飞机的信息显示。
-
双击“多机信息”界面左侧的飞机编号,可在“多机信息”界面中切换显示当前飞机。
注意:“多机信息”界面仅在多机模式下存在。
移动跟随¶
功能简介¶
在一些特定的场景下,比如:海事侦察、海山科研、搜救行动、通信中继等,需要无人机跟随平台移动进行起飞和降落。


Q:什么是移动跟随?
A:无人机自动跟随移动平台同步飞行,可以在车、船载安装,无人机可以自动跟随车船行驶,提高了系统的机动性,使任务部署和团队协作更加灵活。
Q:相对于常规无人机具备哪些优势?
A:搭配移动平台端(车辆或舰船上)高精度惯导系统及相对定位定向系统,可使无人机在狭小的移动平台上进行自主起飞和精准降落,同时支持伴随移动平台飞行。
若需要使用该功能,可联系翔仪商务经理咨询。
地面站设置说明¶
使用本地基站采集¶
- 首先打开地面站,在飞行控制界面打开移动跟随功能,界面如下所示:

| 名称 | 内容 | 含义 |
|---|---|---|
| 跟踪源 | 选择为“移动平台” | --- |
| 地理系-东北向距离 | 以 00 点为原点,以地理的东西南北作为坐标轴方向设置跟随点 | 东向正值向东,负值向西; 北向正值向北,负值向南 |
| 机体系-前后左右偏置 | 以 00 点为原点,以平台前向的前后左右为前后左右设置跟随点 | 左右正值向右,负值向左; 前后正值向前,负值向后 |
| 高度 | 相对于 00 点的相对高度 | 正值向上,负值向下 |
| 高度跟随 | 是否以设定相对高度进行跟随 | 相对 00 点的高度 |
| 航向 | 相对于平台前向的相对航向 | 正值顺时针,负值逆时针 |
| 航向跟随 | 是否以设定相对航向进行跟随 | 相对平台前向的航向 |
| 定位类型 | 当前相对位置的定位精度 | 50-正常; 100-机载端相对定位丢失; 0-所有相对定位丢失 |
| 获取当前 | 将飞机当前相对位置填写到目标值内 | --- |
| 开始跟随 | 根据填写的相对值进入跟随模式 | |
| 结束跟随 | 退出跟随模式 |
- 点击“配置”按钮,打开基站信息配置界面,如下图所示:
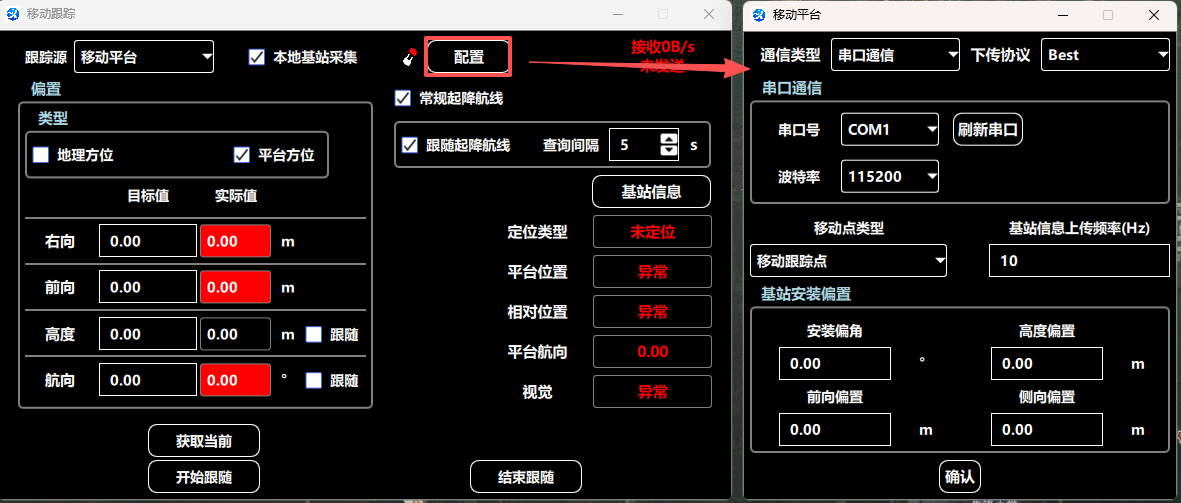
| 名称 | 含义 |
|---|---|
| 通讯类型 | 默认选择为“串口通信” |
| 下传协议 | 选择为“Best” |
| 串口通信 | 选择串口线B对应的串口号,波特率选择115200 |
| 移动点类型 | 选择为“移动跟踪点” |
| 上传频率 | 10Hz |
| 安装偏角 | 根据实际情况填写双天线安装偏角 |
| 高度偏置 | 保持默认为0 |
| 前向偏置 | |
| 侧向偏置 |
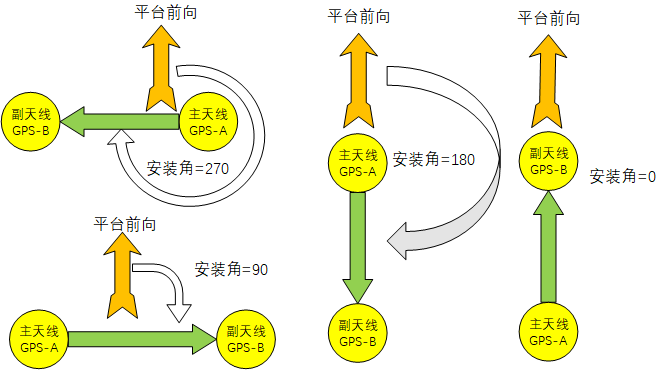
- 地面基站双天线安装偏角设置方法如下:
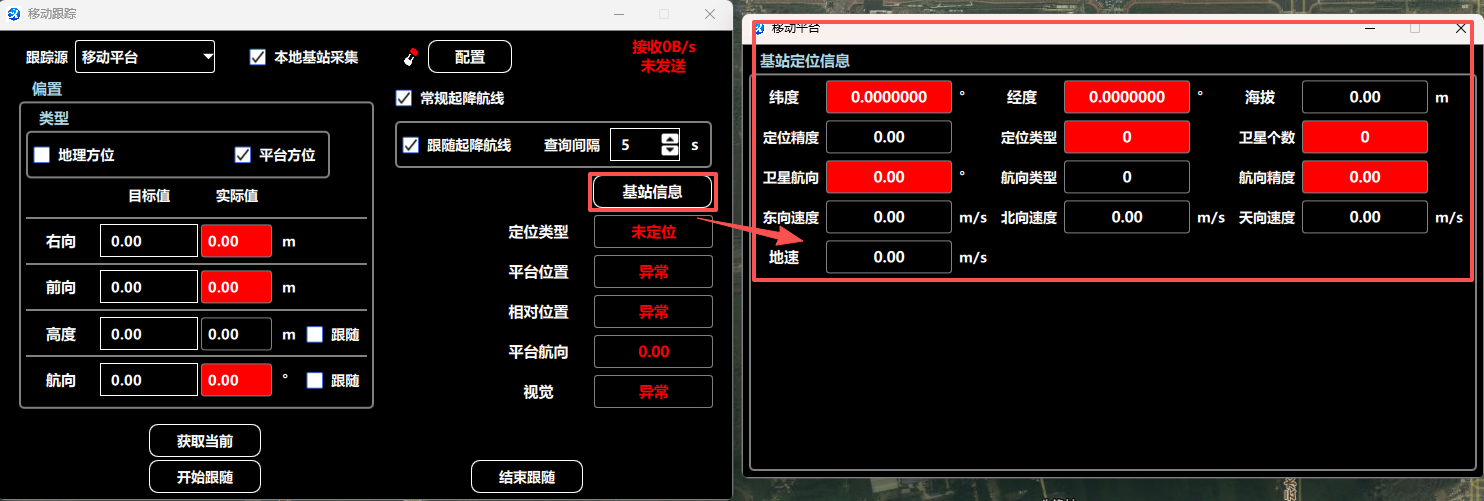
地面基站配置完成后点击“确认”并关闭此界面,然后在移动跟踪界面,点击连接,状态变为“绿色”,表示已连接到基站信息通讯串口。点击“基站信息”按钮,打开基站信息查看界面。正确建立通讯后,可以看到基站实时更新,如下图:
不使用本地基站采集¶
注意 :
与“使用本地基站采集”的区别在于地面是否连接2根串口线,若仅连接1根串口线,则地面站打开串口即可,打开移动跟随界面观察动平台的信息即可。
点相对位置补偿¶
-
设备连接上电
-
机载端上电,正确连接地面端并上电,正确配置地面基站信息,正确连接到基站信息串口,观察飞机相对定位状态为50且稳定。
-
根据需要,勾选“高度跟随”,“航向跟随”。一般情况可以全部勾选。
-
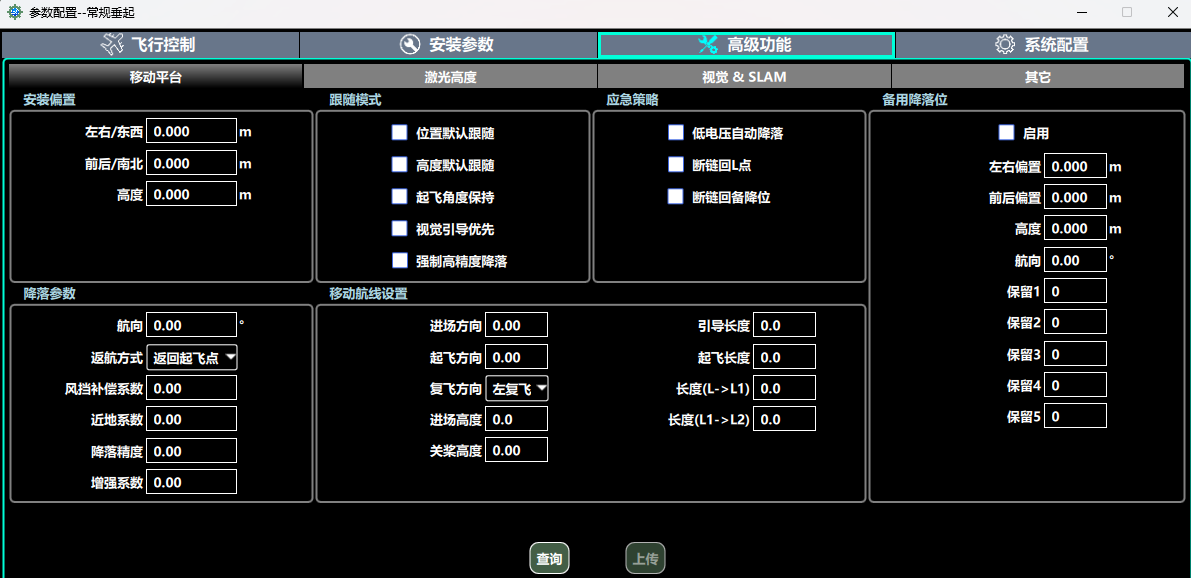
“安装向导”界面,选择“移动平台设置”界面,勾选默认跟随。界面参数如下:
-
-
00点相对位置设置
-
确认飞机返航方式为“返回00点” ;
-
将飞机放置于起降平台上(此相对位置点称之为00点),安装偏置参数先置0;
-
在“移动跟踪界面,点击“获取当前”;
-
手动将右向偏置,前向偏置和高度偏置,分别填写到“移动平台”界面的左右安装偏置,前后安装偏置和高度安装偏置中,点击上传;
-
观察此时飞机所在点的相对位置和高度已变成0附近,说明00点位置修正成功,飞机将以此点的相对位置为00点。
-
起飞检查¶
-
规划合适的飞行航线,并检查航点信息是否合适;
-
点击“起飞检查”按钮,打开起飞检查界面,按照起飞检查流程提示,依次进行起飞检查。
注意 :
起飞检查非常重要,请仔细检查并确认。
增稳模式跟随飞行¶
-
起飞,确认平台信息配置无误,确认基站信息正确,有两种起飞方法:
-
增稳模式下遥控器解锁起飞(或者手动模式起飞,起飞后切换到增稳模式),起飞到一定高度后,摇杆归中,飞行阶段变为“起飞/起飞完成-跟随”,飞机自动跟随当前相对于平台的位置和高度。
-
增稳模式,地面站软件双击“起飞”按钮,电机预旋,再次双击,飞机跟随起飞到起飞高度(默认5m)与平台保持相对静止。
-
-
降落
-
控制源为RC,可以将飞行模式切换到“手动”,手动操纵飞机降落;或者在增稳模式飞机位置跟随情况下(横滚和俯仰摇杆归中),只收低油门摇杆,飞机保持位置跟随降高,降落到移动平台上。
-
若控制源为GS/Bar,双击 “回家降落/返航”,飞机将返航到00点位置跟随,再次双击“回家降落”,飞机将以跟随模式降落并加锁。
-
自主模式跟随飞行¶
起飞前请确保常规起飞检查已完成,并再次检查航线规划是否合理,确保航线已正确上传,确保飞行场地满足飞行航线要求。检查飞机相对定位状态为50稳定,基站信息界面无红色警告。
-
将飞行模式切换到“自主”模式,飞机自动进入“自主-跟随”模式。
-
双击起飞按钮,电机预旋,再次双击起飞按钮,飞机跟随起飞,跟随移动平台飞行并同时爬高,爬升到转换高度后,机头自动朝P1点对准并转换。
-
速度加至转换速度后,飞机进入固定翼模式,,退出跟随并进入航线飞行,飞行阶段变为“自主-巡航”。
-
当飞机飞行完所有航点后,进入返航航线后,将自动进入跟踪模式,并开始返航盘旋。
-
飞机在EL段,切到旋翼后,飞至降落点上空继续跟随。
-
双击“回家降落”按钮,飞机开始跟随降高(飞行阶段为自主-降落-跟随),降落完成后自动加锁。
注意 :
飞机在飞行时,请注意观察飞机状态,确保飞行器安全,包括:
-
起飞前确保飞机已勾选默认跟随,相对定位50稳定,基站信息界面无红色告警显示;
-
飞机处于跟随模式飞行时,请确保相对定位50稳定,基站信息界面无红色告警显示;
-
飞机处于航点模式飞行时,注意监测电池电压,卫星定位状态是否正常。
第三方交互¶
功能简介¶
打开“用户设置”,切换到“工具按钮”界面,勾选“第三方交互”功能即可,如下图所示:


数据转发¶
上图所示,点击“数据转发”可打开设置界面,如下图所示:

注意:
使用该功能时,请联系翔仪工程师。
基站位置修正¶
使用场景¶
-
单基站RTK定位场景下,对基站位置进行精准修正,确保基站作为差分基准的位置精度,为无人机提供有效差分修正数据,保障无人机厘米级定位准确性;
-
多基站RTK组网定位场景下,对所有基站位置进行统一标定,使各基站归算至同一误差参考体系,避免无人机飞行过程中切换不同基站时,因基站间位置基准偏差引发的定位跳变、偏移问题,保障无人机定位的连续性与稳定性。
定位信息获取¶
在进行基站位置修正功能使用前,首先需要测量地面基站的精确位置信息,该信息一般可由全站仪打点或任务指定的第三方系统测量得到。所需的定位信息为:基站位置的经度、纬度、海拔高度、仪器高度。测量原则如下所示:
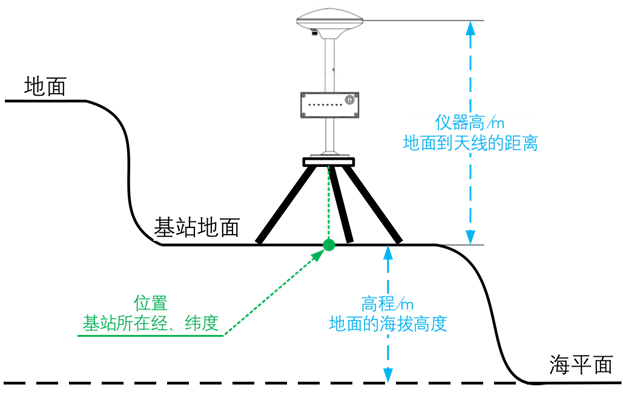
依据图中所示,将地面基站所在地面位置记为所需定位信息的经纬度,地面的海拔高度+仪器高=所需定位信息的高程。
连接示意图¶
基站位置修正时系统连接示意图如下所示:
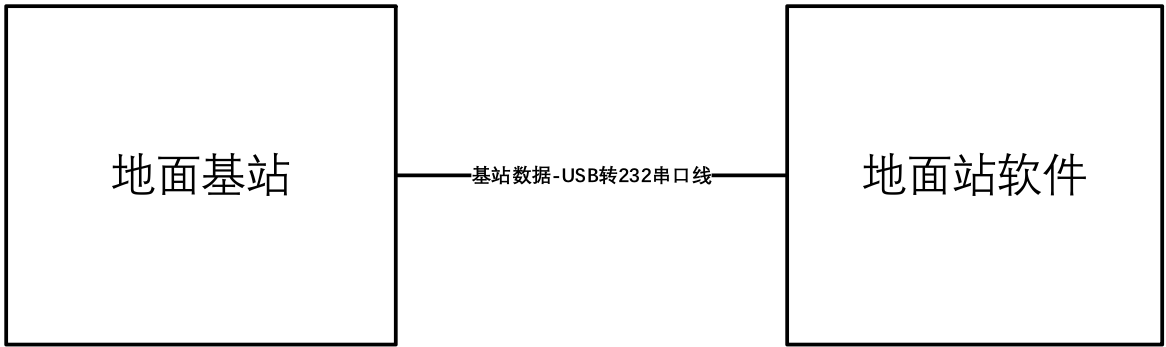
使用 USB 转 RS-232 串口线,将地面基站的“基站数据口”与电脑进行相连接。
操作流程¶
- 在“用户设置”->“工具按钮”界面,勾选“基站位置修正”功能,如下图所示:

- 在更多设置界面,找到基站位置修正功能并打开。

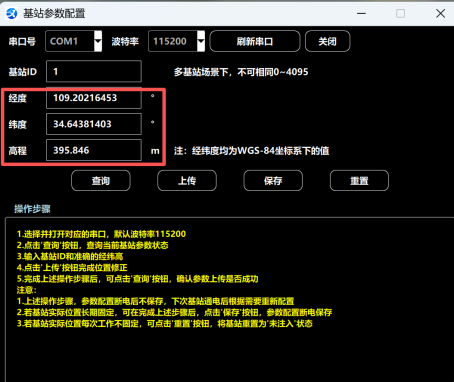
- 打开基站位置修正功能界面,选择与“基站数据口”相连的串口号打开,波特率115200。

- 将第三方系统测量所得定位信息(经度、纬度、高程)手动输入,核对数据无误后点击上传。
-
基站位置长期固定可点击保存按钮,基站断电后仍可保存基站位置。
-
基站位置不固定可点击重置按钮,将基站重置为未注入状态。
注意:
- 多基站场景需要填写正确的基站ID。
UOM上报¶
功能简介¶
根据关于发布民用无人驾驶航空器飞行动态数据报送要求的公告与《民用无人驾驶航空器空中交通管理信息服务系统数据接口规范》的要求与规范,实现民用无人驾驶航空器空中交通管理信息服务系统与无人驾驶航空器系统运行控制系统的双向数据通信。
使用说明¶
UOM功能主要是将当前地面站所连接飞机的飞行动态数据上报到UOM平台。
使用要求¶
-
需要飞控及地面站支持UOM功能即可,若需要该功能,可联系翔仪商务经理进行咨询。
-
联系翔仪工程师,下载最新版本地面站。
操作步骤¶
打开“用户设置”,切换到“工具按钮”界面,勾选“UOM”功能即可,如下图所示:
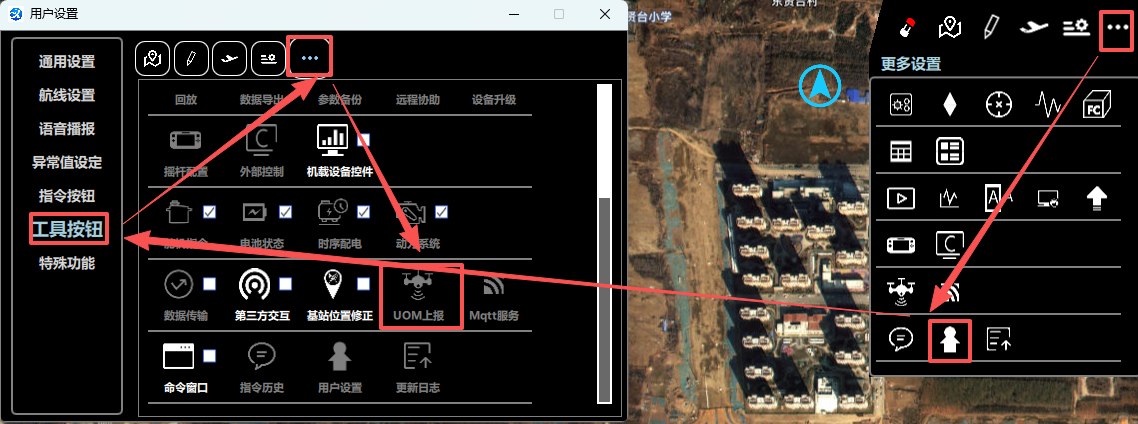
打开“UOM”功能如下图所示:

-
坐标类型:WGS-84、CGCS2000、GLONASS-PZ90;
-
真高类型:相对于起飞点高差、相对于当前位置地面高差;
UOM功能支持“在线上报”和“离线上报”等2个选项,下文针对两个选项做详细说明。
在线上报¶
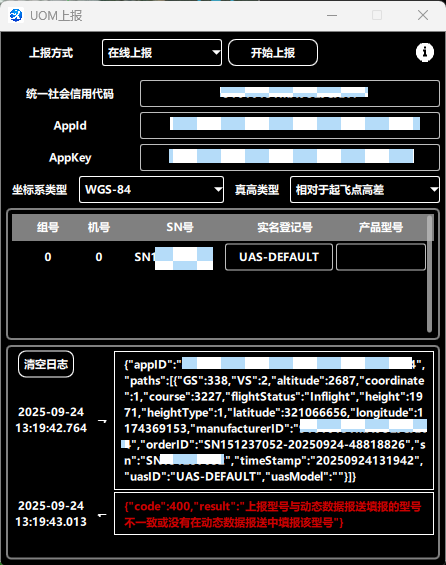
上报方式选择“在线上报”选项,需要用户填写:企业统一社会信用代码、AppId、AppKey,并需要设置:坐标系类型、真高类型信息,如下图所示:
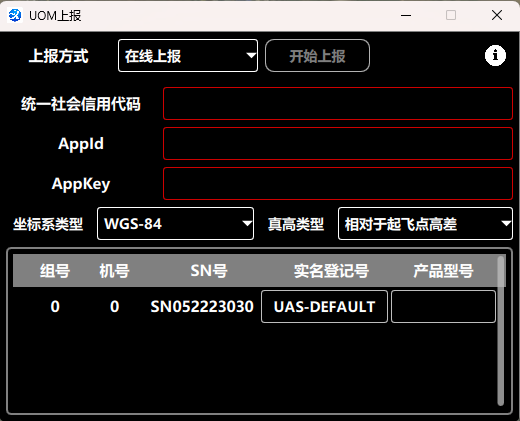
地面站连接飞控后,打开UOM界面,下方列表会自动刷新显示当前已连接的飞机信息:
-
SN号,当前已连接飞控的编号(不可修改);
-
实名登记号,默认为“UAS-DEFAULT”;
-
产品型号,需要填写“企业已注册的产品型号”。
所有数据输入完成后,点击“开始上报”按钮,即可将当前飞机的动态数据上报至UOM平台,“开始上报”则转换为“停止上报”字样,上报方式、社会统一信用码、AppId、AppKey、坐标系类型、真高类型以及飞机列表等内容禁止编辑。
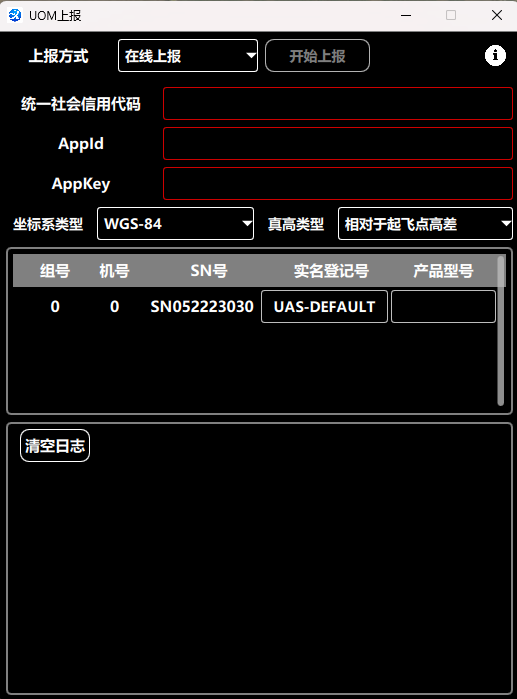
上报日志在详细信息区进行更新。首行右方“详细信息”按钮,单击按钮可打开、隐藏日志界面,如下图所示。
日志界面若上报正常,则返回值为“绿色” ;若存在上报异常数据,则返回值为“红色”,状态如下图所示。详细信息区提供“清空日志”按钮,支持一键清空日志数据功能。
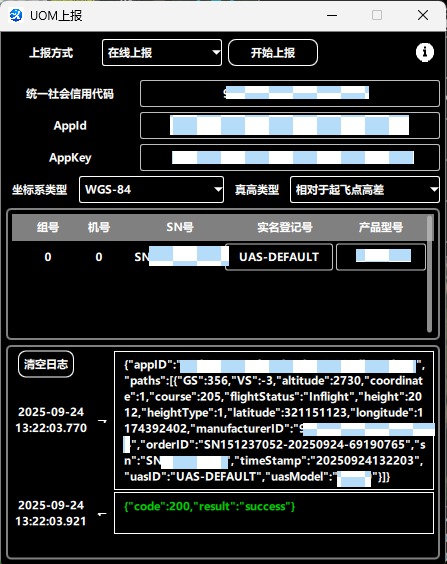
日志备份文件存储在“安装目录\AppLog\UOM”目录下以“.json”文件格式存储。
点击“停止上报”按钮,当前存在飞机数据停止上报,上报类型、社会统一信用码、AppId、AppKey、坐标系类型、真高类型以及飞机列表内容允许编辑。
注意 :
-
若企业统一社会信用代码、AppId、AppKey的文本存在错误,则“开始上报”按钮不可用。
-
上报数据并非只要连接飞机即可上报。仅上报飞机从起飞开始至降落的数据。若飞机未离地(例如:准备飞行阶段),数据是不会被上报的。
离线上报¶
上报方式选择“离线上报”选项。如下图所示:
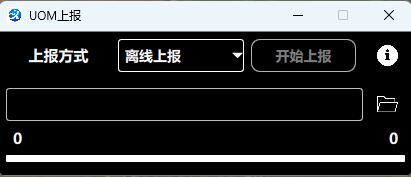
点击“选择文件”图标,选择json文件,文件名称在界面显示。要求如下:
-
若文件存在上报失败的数据,则“开始上报”按钮可用,进度条右上方显示上报失败的数据条,界面提示“读取数据完成!”;
-
若文件不存在上报失败的数据,则“开始上报”按钮不可用,界面提示“未读取到上报失败数据!”。
点击“开始上报”按钮,将当前读取的上报失败数据重新上传,“开始上报”则转换为“停止上报”字样,,界面提示“正在上报数据……”,上报日志在详细信息区更新。上报完成后,自动停止上报,按钮由“停止上报”按钮改为“开始上报”按钮,界面提示“上报数据结束!”。
点击“停止上报”按钮,界面提示“上报数据暂停……”,若重新点击“开始上报”按钮,则重新上报之前的上报失败数据。
注意 :
- 若因为在线上报时,可能由于网络等原因存在上报失败的数据,则可使用“离线上报”功能重新上传至UOM平台进行数据补充。
MQTT服务¶
打开“用户设置”,切换到“工具按钮”界面,勾选“MQTT服务”功能即可,如下图所示:

注意:
- 如需使用,请联系翔仪商务经理。