应急保护¶
声明¶
-
飞控系统应急保护旨在为用户提供飞控系统突发状况(如传感器故障、数据链路中断、姿态失控等)的应急处置指引。
-
由于飞控固件更新、算法优化或硬件迭代,部分应急方案可能随版本升级发生变化。用户应结合最新的固件说明、技术公告,验证手册内容的适用性,避免依赖过时信息进行操作。
遥控器丢失保护¶
遥控器信号丢失的判定依据¶
飞控通过接收机 SBUS 信号中的标志位实时监测遥控器信号状态,当信号中断或异常时,会立即触发 “遥控器” 异常提示(地面站左侧异常栏警告),并根据当前控制源类型、飞行模式执行对应应急操作。
应急逻辑¶
控制源为RC¶
此场景下飞控优先响应遥控器指令,信号丢失后应急操作与飞行模式强相关:
-
手动/增稳-旋翼模式:
-
立即增稳悬停。飞控自动切换至 “增稳悬停” 状态,锁定当前高度与位置。
-
等待信号恢复。若信号恢复,飞控立即重新响应遥控器控制(模式开关、摇杆均生效),建议立即返航降落排查原因。
-
超时自动返航降落。若超时未恢复,飞控执行自主返航:
-
返航点判定:已上传航线则返回 “航线降落点”,未上传航线则返回 “起飞点”;
-
返航高度规则:当前高度>设定 “返航高度” 时,以当前高度返航;当前高度<设定 “返航高度” 时,先爬升至返航高度再返航;
-
降落流程:到达返航点后自动垂直降落,接地后停车。
-
-
-
手动/增稳-固定翼模式:
-
飞控系统检测到遥控器信号丢失,无论飞机当时处于何种飞行状态,均会立即自动切换至自主模式飞行,执行机上已有的航线;
-
当控制源为遥控器时,只要遥控器信号恢复,飞控系统将即刻响应遥控器发出的指令,包括飞行模式开关的切换以及摇杆的各项操作。
-
-
自主模式:
- 飞控仅提示 “遥控器” 异常,继续执行预设航线任务;
控制源为GS/Bar¶
此场景下飞控以地面站指令为核心,遥控器信号仅作为备用,丢失后应急逻辑:
-
所有飞行模式(手动/ 增稳 / 自主)均不主动执行应急操作,仅在地面站左侧异常栏提示 “遥控器” 异常;
-
飞控持续响应地面站指令(如航线调整、模拟摇杆控制),直至遥控器信号恢复或地面站执行其他操作。
注意 :
-
当控制源为遥控器时,无论何时,只要遥控器信号恢复,飞控系统将即刻响应遥控器发出的指令,包括飞行模式开关的切换以及摇杆的各项操作。
-
鉴于信号丢失可能预示着潜在的故障风险,建议操作人员在遥控器信号恢复后,立即操控飞机返航降落,以便全面检查并彻底排除故障原因,保障后续飞行安全。
-
控制源为GS/Bar时,必须在遥控器上设置“控制源切换”功能,保证地面站信号丢失后,遥控器可操作。
通信链路丢失保护¶
故障判断说明¶
- 若上行链路断开超过“判断时间”,地面站软件则提示“链路”异常。
- 链路故障判定后,飞控系统将等待操作人员执行应急处置。若超出应急处理时限仍未收到有效操作指令,飞行器将自动执行预设应急策略,如自动返航或继续执行当前飞行任务,具体动作由预先配置的应急模式决定。
增稳模式下链路故障¶
当控制源为GS/Bar时,若链路出现故障,地面站软件左上角会清晰显示“链路异常”提示。系统在准确判断链路故障后,将自动切换至自主模式,执行机上已有的航线。此过程只在确保飞机在链路故障的情况下,仍能维持稳定的飞行状态,按照预设应急策略进行后续操作。
当控制源为RC时,若链路出现故障,地面站软件左上角会清晰显示“链路异常”提示,RC信号正常的情况下不影响操作。
自主模式下链路故障¶
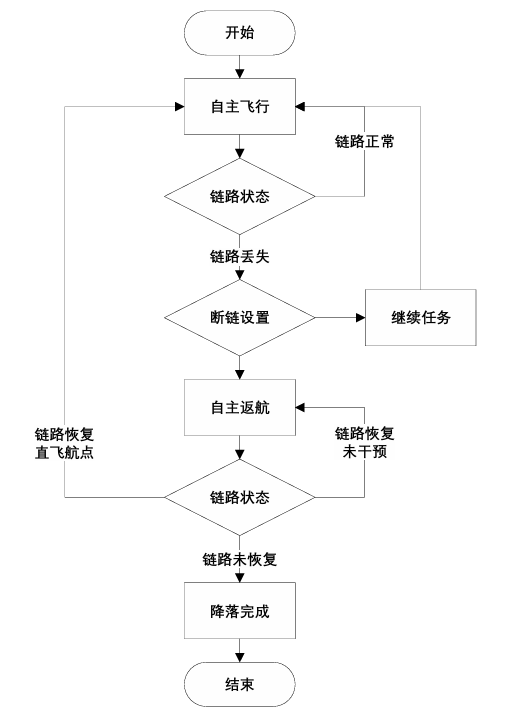
在自主模式下,无论控制源是遥控器(RC)还是地面站(GS/Bar),应急处理方式相同,都会根据数传链路故障时间启动应急程序。应急流程如下:
实际操作时常用逻辑的判断¶
-
控制源为RC
-
在飞机沿自主航线飞行期间,一旦遥控器信号丢失,飞机不受影响,会严格按照预设航线持续自主飞行。当遥控器信号重新恢复时,飞控系统会迅速响应遥控器发出的控制指令,具体响应情况如下:
-
若信号恢复时,遥控器上的模式切换开关处于自主挡位,飞机将维持当前的自主飞行状态,依照预设航线继续飞行,不受干扰地完成既定飞行任务。
-
若信号恢复时,遥控器的模式切换开关处于手动或增稳挡位,飞机则会即刻切换至对应的手动模式或增稳模式。
-
在手动模式下,飞控系统不参与维持飞机的稳定性,操作人员直接控制舵面偏转角度,从而实现灵活的手动控制。
-
在增稳模式下,飞控系统辅助维持飞机的稳定性,同时操作人员也可对飞机进行适当的调整操作,从而实现灵活的手动控制。
-
-
-
-
控制源为GS/Bar
-
在飞机自主飞行进程中,若数传链路发生中断,并且中断时长超过预先设定的“链路故障判断时间”,飞机将依据提前设置好的应急策略执行相应操作:
-
若应急方式设置为“继续任务”,飞机将保持原有的航线规划,持续自主飞行,按照既定程序完成剩余的飞行任务,确保飞行任务的连贯性和完整性。
-
若应急方式设置为“返航”,则飞机将自动返回至指定的降落点。
-
-
若飞机在返航途中数传链路重新恢复正常,飞机的飞行状态保持不变,继续执行返航操作。不过此时,操作人员可借助地面站软件对飞机重新进行操作与控制:
-
通过双击飞行控制栏中的“增稳”按钮,将飞机模式切换为增稳模式。当控制源为Bar时,使用地面站软件的虚拟摇杆来控制飞机的运动。
-
利用地面站软件的直飞航点功能,打断飞机返航操作,让飞机继续执行之前因链路故障而未完成的航线任务,保证飞行任务的顺利推进。
-
-
卫星丢失保护¶
卫星丢失,即常说的“丢星”,是飞行过程中极为严重的故障情况。一旦发生定位故障,飞机将失去对自身位置的精确感知,进而无法依照预定航线继续飞行。 与此同时,地面站软件也无法获取飞机的实时位置数据。在这种危急状况下,若飞机处于操作人员的可视距离范围内,并且遥控器信号传输稳定良好,操作人员应迅速手动操控飞机,使其执行返航操作,并确保安全降落。若飞机已超出可视距离范围,应依据飞机的实际状况、飞行环境以及设备配置等因素,果断抉择是否就地降落,促使飞机尽快安全着陆,最大程度降低因定位故障可能引发的严重风险和损失。
旋翼/固定翼-手动模式定位故障¶
-
当飞机处于手动模式时,出现卫星信号丢失的情况,系统不会自动触发任何应急操作程序,飞控控制逻辑与丢星前无变化。
-
地面操作人员需保持高度警惕,时刻密切关注地面站软件所反馈的数据信息。观察到卫星信号丢失的情况时,建议在第一时间通知负责飞行的操纵手,并使其尽快安排飞机降落。
-
降落后,可对定位系统及相关硬件设备进行全面检查,查明故障根源,避免因定位异常长期存在导致飞行风险持续升高。
旋翼-增稳模式定位故障¶
-
在增稳模式下,若飞机丢失卫星信号,虽然不会在瞬间触发自动应急程序,但随着时间的不断推移,受到飞机机体振动、气流干扰等多种因素的综合影响,飞机在缺乏卫星定位数据支持的状态下,其可控性会逐步下降。基于此,一旦观察到丢星现象,建议操作人员立即制定降落计划,安排飞机降落,以明确故障原因。
-
倘若飞机仍处于可视距离范围内,操作人员可将飞行模式迅速切换至手动模式,借助遥控器手动操控飞机,维持飞机的基本飞行姿态稳定,保障飞机不出现大幅度的姿态变化和飞行轨迹偏差,并尽快引导飞机安全降落。
-
旋翼-增稳模式下丢星后,各方向控制逻辑变化如下:
-
水平方向:控制逻辑将退化为姿态控制,摇杆回中不会锁定当前位置仅会姿态回平。
-
垂直方向:高度依然可以使用气压高度锁定,但可能会有波动。
-
航向控制:与丢星前保持一致。
-
固定翼-增稳模式定位故障¶
-
在增稳模式下,若飞机丢失卫星信号,虽然不会在瞬间触发自动应急程序,但随着时间的不断推移,受到飞机机体震动、气流干扰等多种因素的综合影响,飞机在缺乏卫星定位数据支持的状态下,其可控性会逐步下降。基于此,一旦观测到丢星现象,建议操作人员立即制定降落计划,安排飞机降落,以明确故障原因。
-
倘若飞机仍处于可视距离范围内,操作人员可将飞行模式迅速切换至手动模式,借助遥控器手动操控飞机,维持飞机的基本飞行姿态稳定,保障飞机不出现大幅度的姿态变化和飞行轨迹偏差,并尽快引导飞机安全降落。
-
固定翼-增稳模式下丢星后,各方向控制逻辑与丢星前无变化。
旋翼-自主模式定位故障¶
- 旋翼-自主模式下的飞行,仅包含两种情景:一个是旋翼-自主起飞和旋翼-自主返航及降落阶段。自主模式下出现定位故障,应急流程如下图所示:
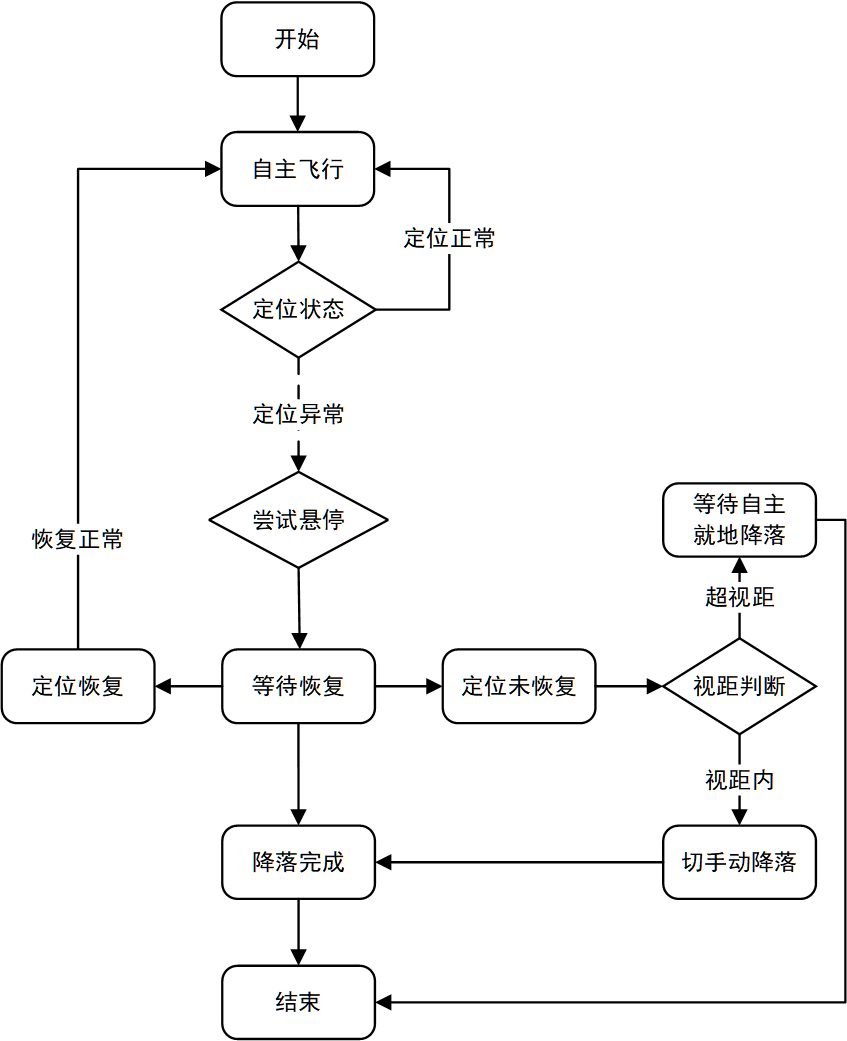
- 定位故障发生时,无人机因无法锁定自身位置,旋翼-自主降落接地阶段易因存在水平速度引发机身剐蹭、侧翻,或因降落场地适配性不足导致碰撞事故。因此,在视距内时应尽快手动操纵飞机返航降落;视距外时可以根据情况等待飞机自主超时执行应急操作,或者手动发送就地降落指令让飞机尽快降落。
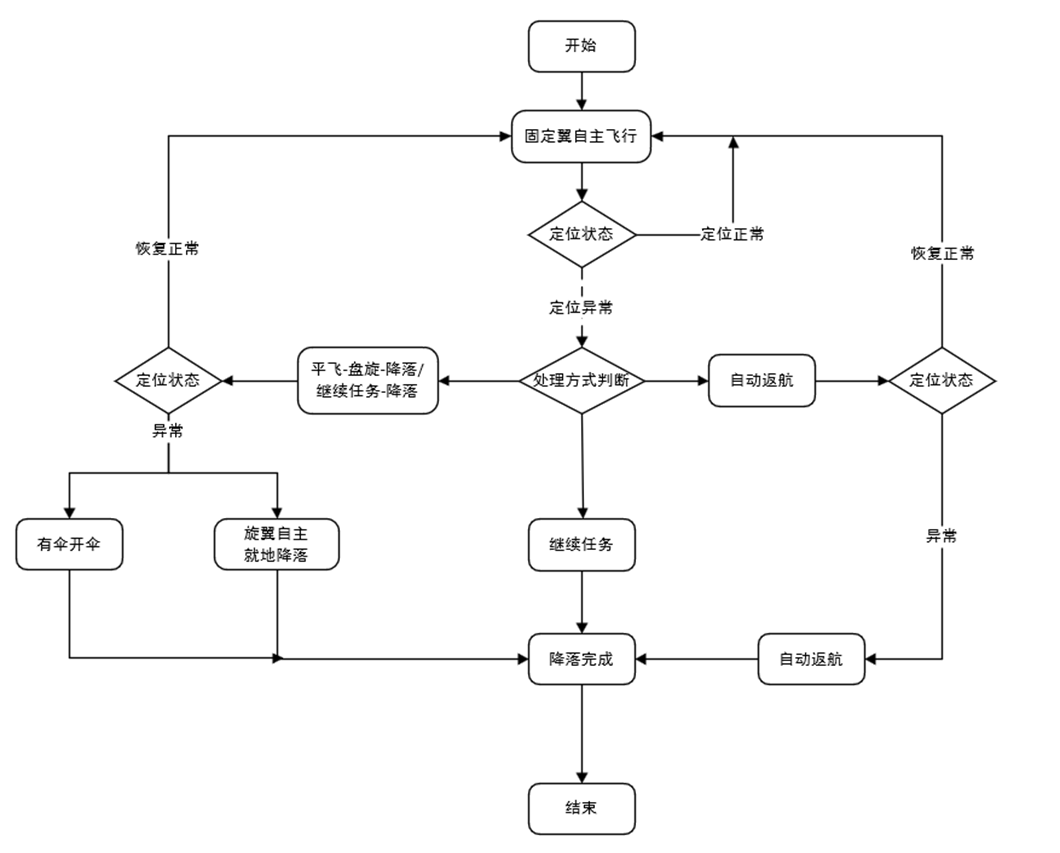
固定翼-自主模式定位故障¶
- 定位失效后,若无人干预超过设定时间(默认30秒),将按照设定的应急处理方式执行。
航向异常保护¶
航向异常保护仅在旋翼模态下生效,当磁罗盘与卫星航向数据同时异常时,地面站软件左上角提示“磁罗盘”“卫星航向”异常,飞控系统将判定航向状态异常。
旋翼-手动模式下航向异常¶
手动模式下航向异常,不会自动执行应急操作。此时航向不会快速转动,但无法长时间保持准确锁定,建议尽快操作飞机返航,检查故障原因。
旋翼-增稳模式下航向异常¶
-
增稳模式下航向异常,不会自动执行应急操作,此时飞机的高度依然可以锁定,高度方向的控制和故障前相同。
-
水平方向控制与航向异常前相同,60s后水平方向控制退化为姿态控制模式,此时打升降和副翼摇杆,对应的是飞机的姿态(和手动模式相同),应立即手动操纵飞机,避免飞机快速移动。
-
航向异常发生后,在视距内时尽快手动操纵飞机返航降落;视距外时可以根据飞机位置信息,推测飞机机头指向,手动操纵飞机返航降落,或者发送就地降落指令让飞机尽快降落。
旋翼-自主模式下航向异常¶
-
自主模式下旋翼模态,航向异常60s内飞行状态与航向正常时相同,默认应急流程为返航,机上有航线返航到L点降落,无航线则返航到起飞点降落。
-
60s后地面站软件提示航向异常,应急逻辑和定位故障相同,故障应急参数相同,相关细节参考《4.3 卫星丢失保护》章节。
-
不同的是,航向异常发生后,可以看到飞机位置信息的正常更新,在飞行操作人员能力允许范围内,可以切换到增稳模式,手动操纵飞机返航降落。
电子围栏保护¶
电子围栏¶
飞控支持越界应急保护策略,电子围栏生成共有两种方式:默认生成、手动生成。
默认电子围栏¶
飞机在获取原点后,会以机上原点(即home点)为圆心,划定一个默认半径为2000米的圆形电子围栏。当上传航线后,电子围栏的半径将扩大,确保覆盖整个航线,其扩展范围为最远航点距离的10倍最小转弯半径(最小扩展100米),电子围栏的最小半径为500米。
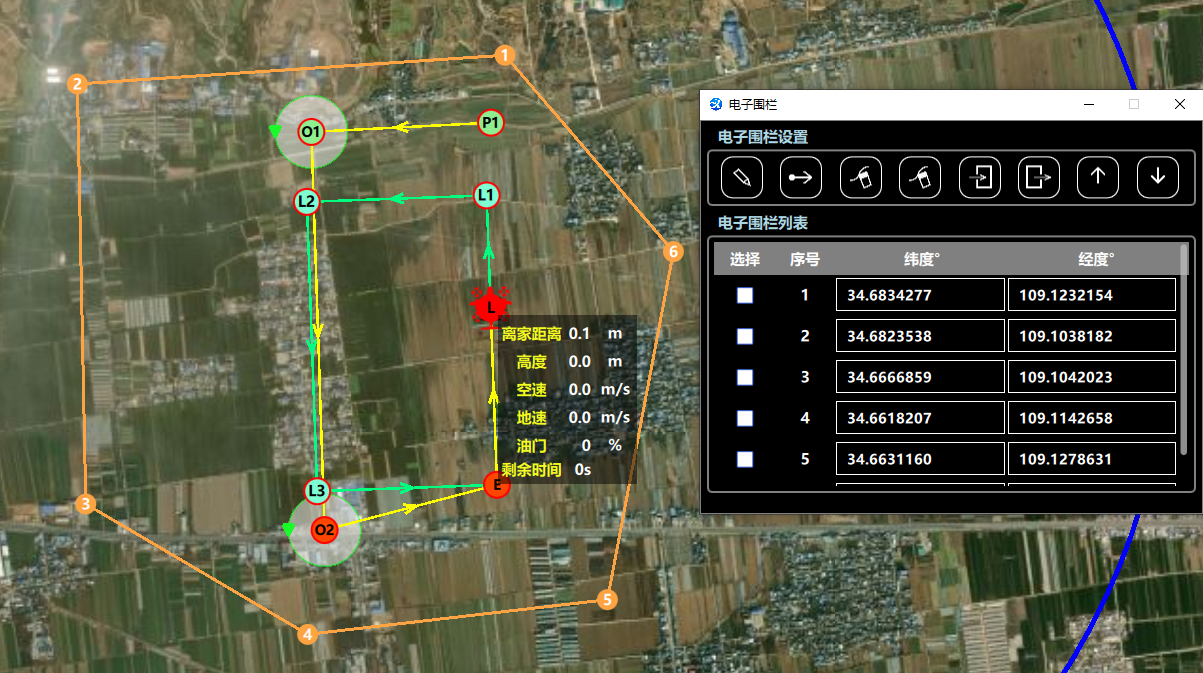
手动电子围栏¶
如需进行手动电子围栏设置,应首先点击软件右上角的“航点规划”栏目,随后选择“电子围栏”选项,即可打开“电子围栏”相关界面。在此界面中,点击“绘制”按钮,然后通过在地图上左键逐次单击,指定电子围栏各点位置,以此形成一个多边形电子围栏,顶点数量最多8个,各顶点经纬度可在界面内进行灵活修改。
越界应急¶
-
当飞机飞出电子围栏,地面站软件的异常栏将明确提示“越界”信息,刘海处下方提示“越界应急启动”字样,以警示操作人员,同时系统将强制其返航至降落点。
-
在此期间,在电子围栏外的所有控制指令(包括遥控器摇杆操作)均不响应。待飞机重新进入电子围栏内,所有控制指令(包括地面站和遥控器指令)将恢复正常功能。 系统默认生成的圆形电子围栏不支持取消,可在调试版地面站修改默认电子围栏尺寸,或通过规划更远距离的航点扩大其有效范围。
-
若控制源为遥控器(RC),飞机重新飞回电子围栏内,将立即恢复对遥控器的响应。
-
若控制源为地面站(GS)或Bar,触发越界应急返航后,飞机将继续保持自主模式并继续返航。若想让飞机从故障前的航点继续巡航,可以使用“直飞航点”功能,使飞机从指定航点开始巡航。
注意 :
越界应急仅在增稳模式和自主模式下生效,在手动模式下无效。
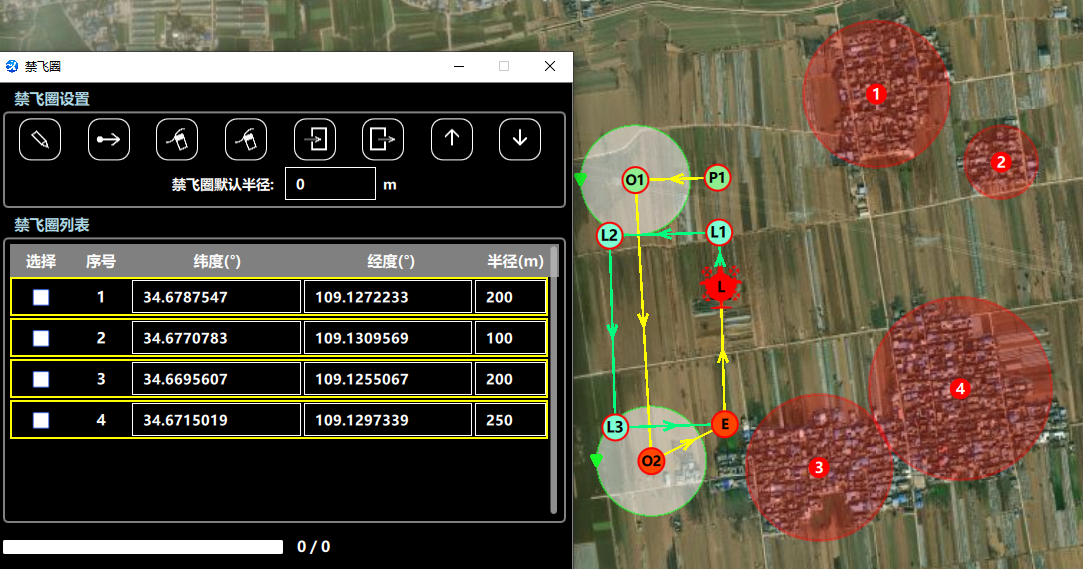
禁飞圈保护¶
如需进行禁飞圈设置,在“航点规划”栏中打开“禁飞圈”界面。在此界面中,点击“绘制”按钮在地图上左键单击指定禁飞圈的圆心位置,禁飞圈最大可设置数量为15个,圆心经纬度以及半径等参数,可在界面内进行灵活修改。
-
当飞机飞行靠近禁飞圈时,地面站软件的异常栏将提示“禁飞区”信息,以警示操作人员。待飞机飞离禁飞圈边界后,异常栏的“禁飞区”提示将随之消失。
-
手动模式下靠近禁飞圈仅有异常提示,但不会主动应急。
-
自主模式下,触发禁飞圈应急,飞机将执行自主返航操作。自主返航过程中可以通过切换飞行模式或者“直飞航点”的方式中断应急。飞离禁飞圈后根据当前控制模式进行响应。
低电压保护¶
功能概述¶
低电压保护根据电压1(旋翼动力电压)、电压测量2(固定翼动力电压)的测量值进行判断和应急,电压3不支持低电压应急。
低电压应急功能仅在旋翼/固定翼-自主模式下有效,旋翼/固定翼-手动、增稳模式下判断发生低电压故障后,地面站软件左上角会提示“电压”异常,但不会自动采取应急措施,请注意观察地面站软件显示的电压测量值,合理安排飞行计划,测量避免电池过放,动力丢失导致坠机。
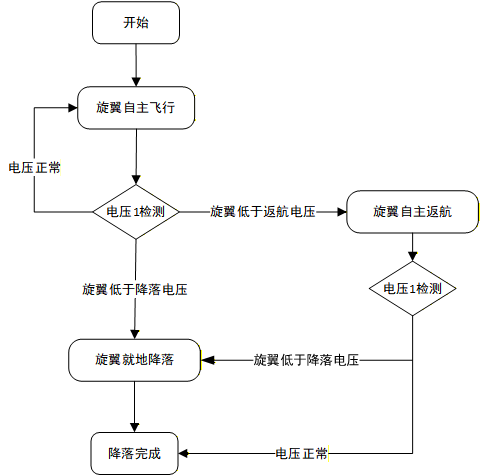
旋翼-自主模式低电压应急¶
电压测量1(旋翼动力电压)测量值连续低于设定的返航电压阈值3秒钟,地面站软件提示“电压”异常,飞机会自动返航至L点降落(地面站软件提示“低电压应急”)
在返航的过程中,如果飞机当前高度超过参数中设定的返航高度,就会以当前高度返航;如果当前高度低于设定的返航高度,就会先升高到返航高度再返航。
在返航的过程中,如果当前旋翼动力电压低于设定的降落电压阈值3s,飞机会停止返航流程,保持当前位置执行就地降落。
旋翼-自主模式低电压应急流程如下图所示:
固定翼-自主模式低电压应急¶
电压测量2(固定翼动力电压)测量值连续低于设定的电压阈值3秒钟,地面站软件提示“电压”异常,飞机会自动进入应急流程(地面站软件提示“低电压应急”),飞机将自主返航至O2点盘旋降高,之后沿E-L段飞行过程中启动旋翼,旋翼飞行至L点上空后自动降落。
固定翼-自主模式低电压应急流程如下图所示:
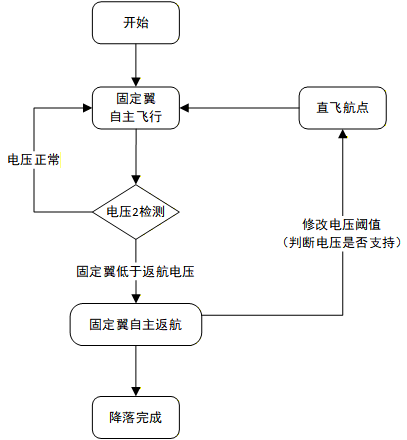
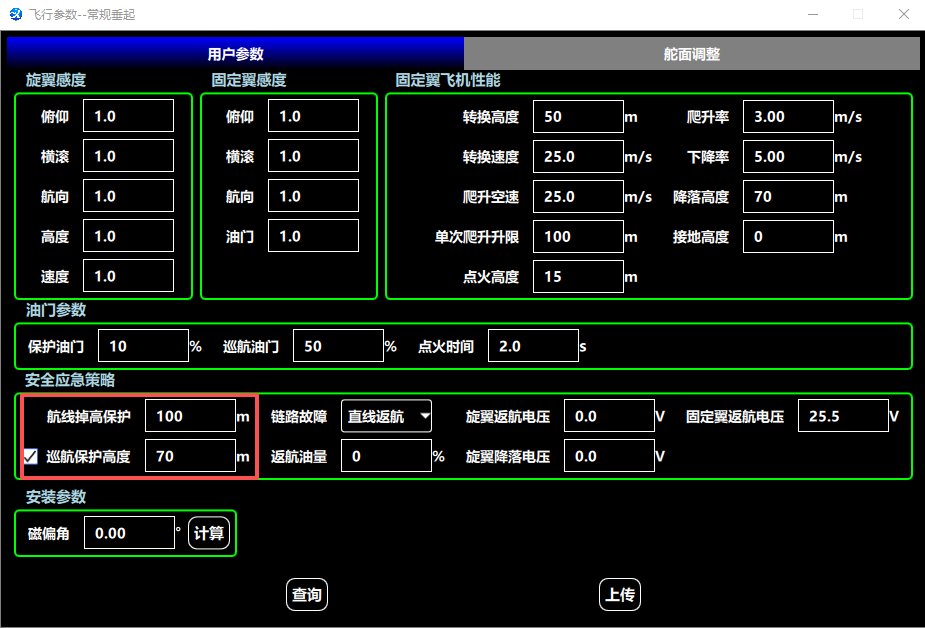
- 低电压阈值设置请参考《5.7.1 飞行参数》章节
姿态异常保护¶
-
本保护仅针对固定翼-自主飞行生效,当飞机实际横滚角大于2倍的最大横滚角时,保护功能自动启动。姿态保护触发后,飞控将主动切断飞机动力,并按不同配置执行应急处置:
-
如果飞机配备有降落伞,则执行开伞动作;
-
如果飞机未配备降落伞,则启动旋翼纠正飞机姿态。
-
旋翼启动后,若在旋翼最大飞行距离内存在起飞点 / 降落点 / 备降点,飞机将飞往对应位置降落;若无可用降落点,则执行就地降落。降落过程支持人工干预,可手动操控飞机返航本场或选择合适区域降落。
高度异常保护¶
高度保护仅在自主模式下生效,分为航线掉高保护以及巡航保护高度两重保护逻辑,示意图如下:
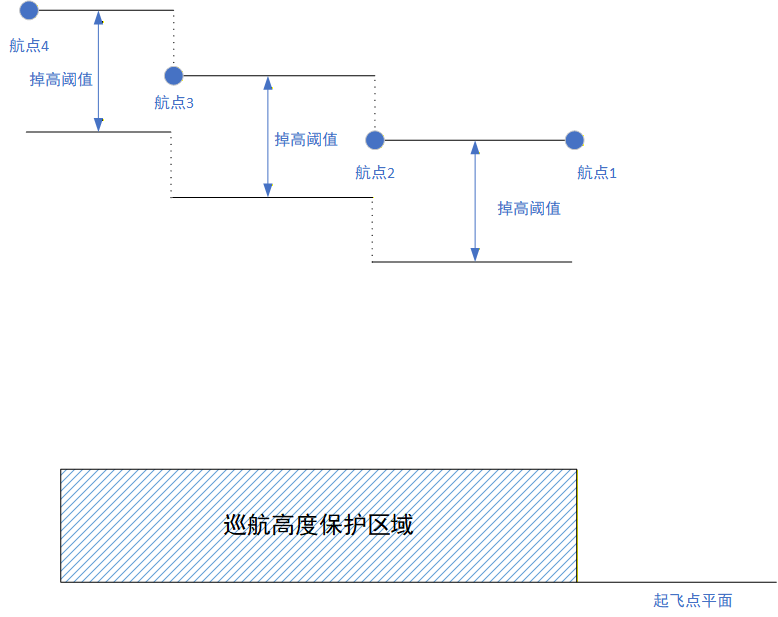
航线掉高保护¶
-
功能定义:自主航线飞行时,以当前目标高度为基准,飞机高度异常下降了“航线掉高保护”设定阈值后,飞控启动自动应急保护。
-
生效条件:仅在固定翼 - 自主模式下有效,生效阶段为 O1→工作航点段、全工作航点段、工作航点→O2 返航段。
-
触发掉高保护后应急逻辑:
-
若飞控配置有降落伞:立即执行开伞动作;
-
若飞控未配置降落伞,立即启动旋翼,如果在旋翼最大飞行距离内有备降点/降落点时,直接飞往备降点/降落点降落;如果在旋翼最大飞行距离内无备降点/降落点,则以旋翼模式就地降落。
-
巡航保护高度¶
-
功能定义:飞机相对起飞点高度低于设定安全高度时,飞控启动自动应急保护。
-
生效条件:仅在固定翼 - 自主模式下有效,不同飞行阶段采用不同保护阈值与处置逻辑:
-
起飞爬升阶段(含 P1、O1 盘旋飞行段):采用“起降保护高度”,保护机制带延时判断逻辑,高度越低触发应急越快。触发后切换至旋翼 - 自主模式,返航至起飞点降落。
-
降落阶段(含 O2 盘旋、E、L 段):采用“起降保护高度”,触发安全高度保护后切换至旋翼模式,返航至降落点降落。
-
巡航阶段(O1→工作航点、全工作航点、工作航点→O2):采用“巡航保护高度”(请按实际飞行航线设定)。
-
-
触发巡航高度保护后应急逻辑:
-
若飞控配置有降落伞:立即执行开伞动作;
-
若飞控未配置降落伞,立即启动旋翼,如果在旋翼最大飞行距离内有备降点时,直接飞往备降点降落;如果在旋翼最大飞行距离内无备降点,则以旋翼模式就地降落。
-
注意:
若不勾选巡航保护高度勾选项时,巡航保护高度无效。
熄火保护¶
发动机具备电启动功能。在飞控参数中勾选油动发动机与油门自动启动,并确保启动信号接线
正确、与飞控正常连接后,飞控可实时监测发动机转速,检测到转速异常时将自动执行熄火应急保护。
熄火保护仅适用于油动发动机,且仅在自主模式下生效,各飞行阶段应急逻辑如下:
-
旋翼自主起飞阶段
-
飞机到达点火高度后,飞控执行首次点火;若未检测到发动机转速,将连续再执行两次点火。
-
三次点火后仍无转速,或检测到转速后再次丢失,飞机将以旋翼模式自主降落。
-
-
旋翼转固定翼阶段
- 若检测到发动机转速丢失,飞控立即控制飞机以旋翼模式返航降落。
-
固定翼起飞阶段
-
检测到发动机熄火后,飞控自动执行三次点火尝试,点火间隔为“点火持续时间”的3倍。
-
点火成功:恢复转速,飞机继续巡航;
-
点火失败:触发高度应急保护,降落点在旋翼最大飞行距离内则旋翼返航,超出最大飞行距离则旋翼就地降落。
-
-
-
固定翼巡航、返航及降落阶段
-
检测到发动机熄火后,飞控自动执行三次点火尝试:
-
点火成功:飞机继续正常飞行;
-
点火失败:停止自动点火,飞机保持当前飞行状态,直至触发高度保护应急。
-
本阶段支持人工干预,可通过手动点火尝试重启发动机。
-
-