基础概念说明¶
概述¶
本章是理解无人机飞行控制逻辑和操作方法的重要步骤,涵盖了控制源类型、飞行模式、飞机模态和飞行阶段四个关键概念,这些概念是无人机飞行操作的理论基础,也是确保飞行安全和任务成功的关键。
控制源¶
控制源类型¶
控制源分为:
-
遥控器(RC):由遥控器控制,可以通过遥控器摇杆和开关控制飞机。
-
地面站(GS):由地面站软件控制,不包含模拟摇杆控制指令,只是通过地面站软件按钮执行特定指令。
-
模拟摇杆(Bar):地面站软件模拟摇杆控制,控制源切换到地面站软件后,打开并启用模拟摇杆,可以通过模拟摇杆控制飞机。
注意:
控制源切换到地面站软件后,不启用模拟摇杆,控制源显示为“GS”,启用模拟摇杆,控制源显示为“Bar”。
控制源切换¶
-
在飞控的遥控器参数设置中,可以将某个通道的功能配置为“控制源切换”。可以使用该遥控器通道来切换控制源。
-
当遥控器参数中某个通道被设置为“控制源切换”功能时,系统将仅响应遥控器指定通道对控制源切换的指令。此时,若控制源信号失效(如遥控器信号丢失),可使用地面站软件进行控制源切换。
-
若未设置“控制源切换”功能,在遥控器正常连接的情况下,通过地面站软件双击“启用地面站”,系统将响应地面站的控制源切换指令,但不能切换飞行模式,除非遥控器断开连接后才可进行模式切换。
注意:
控制源切换逻辑非常重要,请在飞行前仔细阅读并充分理解以下内容。禁止在实际飞行过程中执行本手册未提及的控制源切换操作。
飞行模式¶
在任何飞行模式下,只要控制源为遥控器(RC)且信号正常,飞行模式切换开关将始终保持有效,可随时进行模式切换。
旋翼-手动模式¶
-
副翼和升降摇杆代表飞机的目标姿态:
俯仰杆推杆飞机低头,俯仰杆拉杆飞机抬头; 副翼杆左打飞机左倾,副翼杆右打飞机右倾; 摇杆归中,飞机姿态保持水平(但是位置无法保证不变化)。
-
航向摇杆代表飞机的航向的目标转动速度(与杆量成比例):
左摇杆操作机头往左转,右摇杆操作机头往右转,摇杆归中,航向锁定。
-
油门杆直接控制飞机总的升力大小:
油门杆超过悬停油门,飞机加速上升,油门杆低于悬停油门,飞机加速下降。
注意:
禁止在空中将油门摇杆拉至最低位。
旋翼-增稳模式¶
-
副翼和升降摇杆代表飞机左右运动和前后运动的目标速度:
副翼杆打舵,飞机保持与杆量成比例的向左右运动的速度; 升降杆打舵,飞机保持与杆量成比例的向前后运动的速度; 升降和副翼杆同时归中时,飞机位置锁定。
-
航向摇杆代表飞机的航向的目标转动速度(与杆量成比例):
左摇杆操作机头往左转,右摇杆操作机头往右转,摇杆归中,航向锁定。
-
油门杆代表飞机垂直运动的目标速度:
油门杆高于油门摇杆中立位,飞机以特定的速度(与杆量成比例)向上运动; 油门杆低于油门摇杆中立点,飞机以特定的速度(与杆量成比例)向下运动; 油门杆在中立点,高度锁定。
注意:
禁止在空中将油门摇杆拉至最低
固定翼-手动模式¶
-
副翼与升降控制:摇杆直接控制舵面偏转角度
-
副翼杆:左打杆时,副翼舵面成比例左上、右下偏转;右打杆时,成比例左下、右上偏转;摇杆回中后,舵面恢复中立状态。
-
俯仰杆:推杆时,升降舵面成比例下偏;拉杆时,成比例上偏;摇杆回中后,舵面恢复中立状态。
-
-
方向控制:方向杆直接控制舵面偏转角度
- 方向杆左打杆,方向舵面成比例左偏;右打杆,舵面成比例右偏;摇杆回中后,舵面恢复中立状态。
-
油门控制:油门杆直接调节飞机总的推 / 拉力大小,杆量与推 / 拉力呈正相关。
固定翼-增稳模式¶
-
副翼与升降控制:摇杆对应飞机横滚、俯仰的目标姿态
-
副翼杆:左打杆,飞机保持与杆量成比例的左滚姿态飞行;右打杆,保持成比例的右滚姿态飞行;摇杆回中,飞机横滚回平飞行。
-
俯仰杆:推杆,飞机保持与杆量成比例的低头飞行;拉杆,保持成比例的抬头飞行;摇杆回中,飞机俯仰回平飞行。
-
-
方向控制:方向杆对应转动速度
- 方向杆左打飞机左侧滑,右打飞机右侧滑,方向摇杆回中(副翼杆也回中时),飞机保持直飞。
-
油门控制
-
飞机高度低于起飞爬升高度时,油门为直接控制模式;
-
飞机高度高于起飞爬升高度时,油门空速控制模式。
-
注意:
增稳模式下,禁止在空中将油门摇杆拉至最低,可能导致发动机熄火,建议在摇杆中位附近操作。
自主模式¶
-
进入自主模式后,飞控将按照预设航线路径自主飞行,
-
副翼、升降和航向摇杆仅在飞机自主上升和自主降落阶段起作用,功能和增稳模式的功能相同,可以用来调整飞机自主起飞和降落时的位置和机头指向;固定翼阶段摇杆无效。
-
油门摇杆不起作用,飞机按照设定速度飞行。
注意:
-
飞控断电后不保存当前航线,重新上电后必须重新上传航线。
-
在飞机降落的第一个阶段(快速降落阶段),如果通过摇杆改变飞机位置,飞机的下降速度会变为接地速度(缓降阶段的下降速度),等摇杆回中时锁定当前位置,飞机又会恢复正常的下降速度。
飞机模态¶
垂直起降固定翼无人机具备旋翼和固定翼两种模态,两种模态转换指令可由遥控器发出也可由地面站发出。
注意:
-
空中飞行切换,需要按照要求规划合理的飞行航线。
-
尽量避免在转换过程中遥控器打杆操控无人机。
遥控器操作¶
旋翼向固定翼转换¶
-
地面调试场景:
- 在旋翼-手动或旋翼-增稳模式下,操作员连续两次拨动遥控器7通道“垂直起降切换”开关后,飞机模态由旋翼切换到固定翼。
-
空中飞行场景:
-
在旋翼-手动或旋翼-增稳模式下,操作员连续两次拨动遥控器7通道“垂直起降切换”开关后,飞机进入混合过渡模式。此时,固定翼动力系统开始加速,旋翼系统保持姿态水平。遥控器升降、副翼与航向通道的功能与纯旋翼模式完全一致,可直接操控飞机姿态;油门杆不再直接控制旋翼油门,高度由飞控自动锁定在当前值。
-
随着空速持续增加,当达到预设转换空速时,旋翼停转,遥控器所有舵面指令随即映射至固定翼舵机,飞机正式切换为固定翼飞行状态,按固定翼气动特性执行后续飞行。
-
注意:
-
“垂直起降切换”开关默认为遥控器7通道,操作需要连续两次拨动(从低位开始)。
-
混合模式下,飞控优先保持机体水平,以尽快提升速度。此阶段摇杆控制指令受限,操纵响应幅度较小;待转换完成后,操纵量自动恢复。为避免姿态突变,转换期间请勿大幅打杆,建议全程轻握摇杆,待确认转换为固定翼模态后再做常规机动。
-
若进入“混合”模式后 10 s 内空速仍不足“转换速度”的 50 %,飞控将终止加速,自动退回旋翼模式并启动返航降落;若空速已高于 50 % 但持续 50 s 仍未达到“转换速度”,同样判定为转换失败,立即切回旋翼模式并执行返航。
固定翼向旋翼转换¶
-
地面调试场景:
- 在固定翼-手动或固定翼-增稳模式下,操作员连续两次拨动遥控器7通道“垂直起降切换”开关后,飞机模态由固定翼切换到旋翼。
-
空中飞行场景:
- 在固定翼-手动或固定翼-增稳模式下,操作员连续两次拨动遥控器7通道“垂直起降切换”开关后,飞机进入混合过渡模式。此时,旋翼系统启动,固定翼动力降至最低(电机停转,油机怠速),飞控自动锁定当前高度。遥控器升降、俯仰与航向通道直接操控旋翼舵量,实现姿态调整。
地面站操作¶
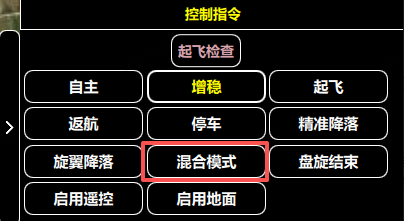
可在地面站软件右下角控制指令栏双击“混合模式”,达到旋翼->固定翼/固定翼->旋翼转换目的,飞控逻辑与手动操纵一致。
飞行阶段¶
飞行阶段代表飞机实际的飞行阶段,需要与飞行模式一起观察来确定飞机当前点的飞行状态。
-
旋翼-准备:飞机处于加锁状态,准备起飞
-
旋翼-解锁:飞机解锁,输出怠速油门
-
旋翼-起飞:飞机正在旋翼起飞阶段
-
旋翼-起飞完成:飞机起飞后到达安全高度(默认为2米)
-
旋翼-准备转换:在自主模式下时,表示飞机到达设定转换高度且正在转动航向对准P1点准备转换到固定翼
-
旋转固:飞机加速阶段,准备转换到固定翼,此时旋翼控制飞机姿态与高度,固定翼以设定的起飞油门加速,待空速达到并持续超过转换速度时,飞控自动判断停止旋翼电机,切换到固定翼模式飞行
-
固定翼-起飞引导:飞机已经转换至固定翼工作方式,进入爬升阶段,此时的目标点为起飞引导点(P1)正在爬升
-
固定翼-起飞盘旋:飞机已经过起飞引导点P1,此时的目标点为起飞盘旋点(O1),到达O1点后盘旋爬升到工作航线高度
-
固定翼-巡航:飞机到达工作航线高度,此时目标航点应为工作航点的1点。
-
固定翼-返航:飞机在自主模式下时,阶段如果为返航,表示飞机正在自主返航,此时目标航点应为降落盘旋点(O2)准备盘旋降高,如果飞行模式- 自主,则无意义
-
固定翼降落盘旋:飞机在自主模式下时,阶段如果为降落盘旋,表示飞机正在(O2)点处盘旋降高,此时目标航点为(O2)
-
固定翼-降落引导:目标点指向E点,引导飞机降落
-
固定翼-准备降落:目标点指向L点,表示飞机准备降落,以设定的降落速度飞向降落点
-
固定翼-重新降落:若飞机当前高度持续高于目标值20m及以上,则目标点指向L1点,会以设定的巡航速度沿L1-L2-L3-E点复飞重新降高
-
固转旋:飞机减速阶段,准备切换到旋翼,此时固定翼收油至怠速油门值开始减速,待空速达到转换速度时飞控自动判断切换到旋翼
-
旋翼-返航:飞机以旋翼模式飞往降落点
-
旋翼-降落:飞机已经到达L点上空,开始降落
注意:
-
飞控断电后,不会保存机上航线。因此,飞控重启后,必须重新上传航线。
-
禁止在没有上传航线时在空中将飞机切换到自主模式。当飞机处于手动或者增稳模式下空中飞行的时候,如果误操作将飞机切换到自主模式,此时机上没有航线,若当前飞行高度低于起飞高度则上升至起飞高度悬停,若当前飞行高度大于起飞高度则当前点悬停。再次将飞行模式切换到增稳或者手动即可恢复控制。