调试版软件功能介绍¶
概述¶
本章是调试版地面站软件的功能介绍,涵盖从建立通信到各个参数及软件功能的使用,本章节介绍了通信连接、状态栏、参数设置、数据分析、回放、详细数据、指令历史、用户模式、模拟飞行、数据转换、频谱分析共计十一个软件功能。
通信连接¶
-
常用的连接方式有串口和UDP两种连接方式:
-
串口连接

-
打开地面站,点击“
 ”,弹出通信配置界面(默认端口类型为串口);
”,弹出通信配置界面(默认端口类型为串口); -
在通信口配置界面中,从串口号列表中选择正确的端口,选好后点击“打开”按钮,即可尝试与飞控建立通信连接;
-
飞控系统上电,等待数据接入。
-
注意 :
-
若地面站软件无法识别到串口号
-
检查串口线是否正确连接到电脑上;
-
若已连接串口线但仍无串口号显示,需到电脑 “设备管理器” 中检查串口线驱动是否成功安装。
-
-
UDP连接
-
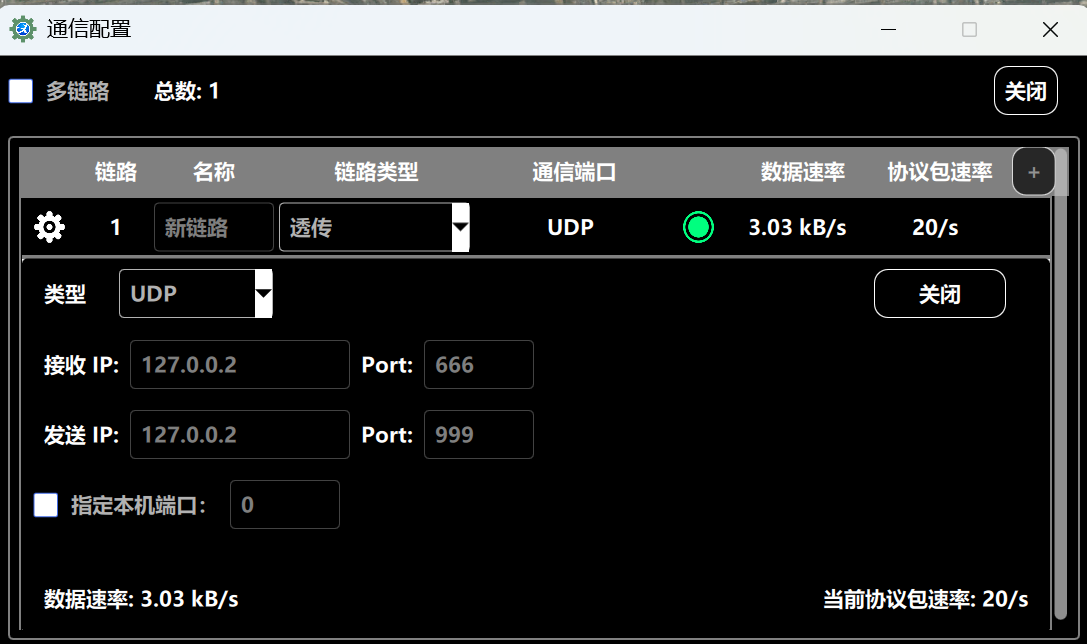
打开软件的通信设置界面,端口类型选择“UDP”;
-
在相应位置填写获取到的飞控设备目标IP地址和端口号,以及本地网络接口的IP地址和选定的端口号;
-
完成参数配置后,点击“打开”按钮。
-
注意 :
-
UDP无法正常连接
-
确保该端口未被其他程序占用;
-
若连接失败,检查网络参数是否正确;
-
防火墙是否阻止了UDP通信问题;
-
本地网络是否能 ping 通 IP 地址。
-
状态栏¶
调试版地面站软件正常连接后如下图所示,功能区大概可分为以下3个部分。

第一区域¶

-
第一区域显示内容如下:
图标 名称 功能说明 
通信开关 点击快速建立通信连接 
通信状态 正常通信时显示通信速率,表示通讯强度 点击WiFi图标可进行通信接口的相关配置
上行静默 未开启上行静默时通信正常  开启上行静默时无上行数据
开启上行静默时无上行数据
机型 显示地面站软件当前机型 
飞行数据 显示更多的飞行数据 
置顶 将软件置于顶部
第二区域¶

- 第二区域中包含参数配置、数据分析、数据导出等功能。
| 图标 | 名称 | 功能说明 |
|---|---|---|
 |
参数配置 | 包含所有飞控参数的设置和配置功能 |
 |
数据分析 | 实时/离线进行飞行数据绘图分析功能 |
 |
回放 | 回放飞行数据 |
 |
详细数据 | 详细的飞控遥测数据 |
 |
指令历史 | 遥控指令的发送和反馈历史 |
 |
命令窗口 | XY命令输入界面 |
 |
用户设置 | 调试版软件的相关设置 |
 |
模拟飞行 | 飞行模拟功能 |
 |
文件转换 | 测试功能 |
 |
频谱分析 | 用于进行频谱分析 |
第三区域¶
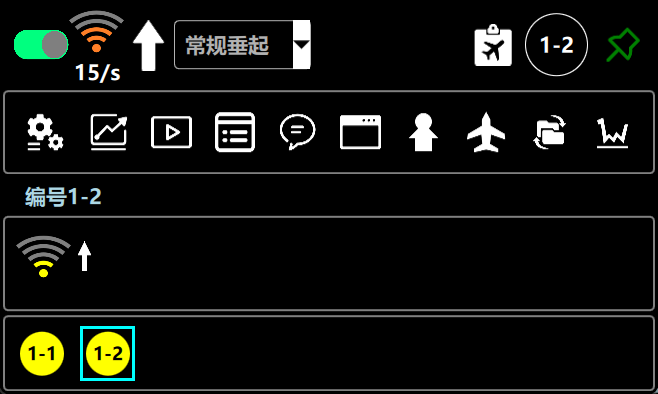
第三区域为飞机切换与状态灯显示区域,仅在多机模式下可见。
-
上方“
 ”为多机气泡,显示当前飞机的组号机号;单击该按钮可折叠/显示下方“多机指示灯”栏。
”为多机气泡,显示当前飞机的组号机号;单击该按钮可折叠/显示下方“多机指示灯”栏。 -
下方多机指示灯栏展示当前系统内的所有飞机,单盏指示灯唯一对应一架飞机。
-
指示灯上的蓝圈,为当前主界面所显示飞机的标识;双击目标飞机对应的指示灯,即可将主界面切换至该飞机的显示页面。
-
指示灯的显示颜色对应飞机的实时健康状态,定义如下:
-
灰色:飞机处于离线状态
-
红色:飞机存在严重故障状态
-
黄色:飞机存在异常状态
-
绿色:飞机无异常提示
-
参数设置¶
概述¶
本小节是飞控的参数设置及功能介绍,涵盖飞控飞行控制各个参数的含义及使用说明,本小节介绍了飞行控制、安装参数、高级功能、系统配置四个部分的飞控参数使用说明。
飞行控制¶
“飞行控制”界面在调试版地面站“参数配置”中打开,包含旋翼控制参数、固定翼控制参数、飞机性能、油门参数、飞行模式、安全应急策略界面。
旋翼控制参数¶
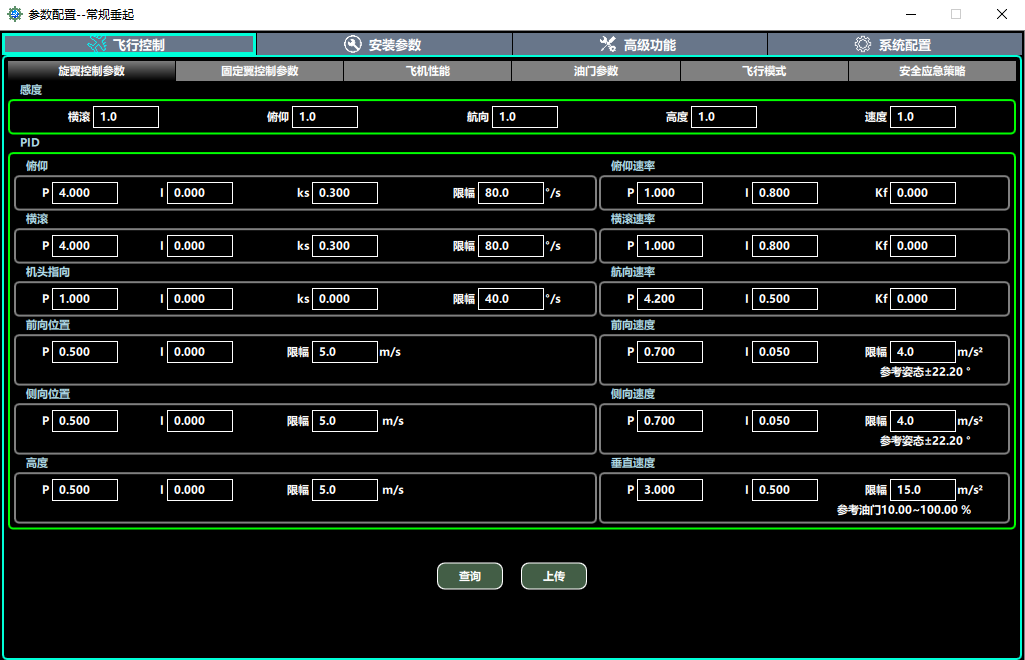
- “感度”栏参数及含义如下:
| 参数名称 | 含义 | 备注 |
|---|---|---|
| 横滚 | 调整横滚方向姿态控制感度 | 默认为 1,最小调整量 0.1 |
| 俯仰 | 调整俯仰方向姿态控制感度 | 默认为 1,最小调整量 0.1 |
| 航向 | 调整航向角锁定感度 | 默认为 1,最小调整量 0.1 |
| 高度 | 调整高度锁定和垂直速度控制感度 | 默认为 1,最小调整量 0.1 |
| 速度 | 调整位置锁定和速度控制感度 | 默认为 1,最小调整量 0.1 |
注意:
-
飞机空中飞行测试时,打舵测试飞机横滚、俯仰的操纵性。如果操纵性很弱,飞机很肉,将横滚和俯仰的感度调大。如果飞机动作特别快,并且伴随姿态晃动,则将横滚和俯仰的感度调小。再次试飞,观察调整的效果。
-
感度调整步长的每次调整不要超过 0.2。按照修改->试飞->降落->修改的步骤循环进行调整,直到将飞机状态调整到合适。
-
"PID"栏常用参数及含义如下:
| 参数 | P(增益) | I(积分) | kf(前馈) | ks(阻尼) | 限幅 |
|---|---|---|---|---|---|
| 俯仰速率 | 调节俯仰转动角速度控制的强弱 | 消除俯仰转动角速度持续误差 | |||
| 横滚速率 | 调节横滚转动角速度控制的强弱 | 消除横滚转动角速度持续误差 | |||
| 航向速率 | 调节偏航转动角速度控制的强弱 | 消除偏航转动角速度持续误差 | |||
| 俯仰 | 调节俯仰控制强弱 | 消除俯仰持续误差 | 调整俯仰稳定性 | 限制最大目标俯仰角速率 | |
| 横滚 | 调节横滚控制强弱 | 消除横滚持续误差 | 调整横滚稳定性 | 限制最大目标横滚角速率 | |
| 机头指向 | 调节航向控制强弱 | 限制最大目标偏航角速率 | |||
| 前向速度 | 调节前向速度控制强弱 | 消除前向速度持续误差 | 限制最大目标俯仰角 | ||
| 侧向速度 | 调节侧向速度控制强弱 | 消除侧向速度持续误差 | 限制最大目标横滚角 | ||
| 垂直速度 | 调节垂直速度控制强弱 | 消除垂直速度持续误差 | 限制油门输出范围 | ||
| 前向位置 | 调节前向位置控制强弱 | 限制最大目标前向速度 | |||
| 侧向位置 | 调节侧向位置控制强弱 | 限制最大目标侧向速度 | |||
| 高度 | 调节高度控制强弱 | 限制最大目标垂直速度 |
固定翼控制参数¶
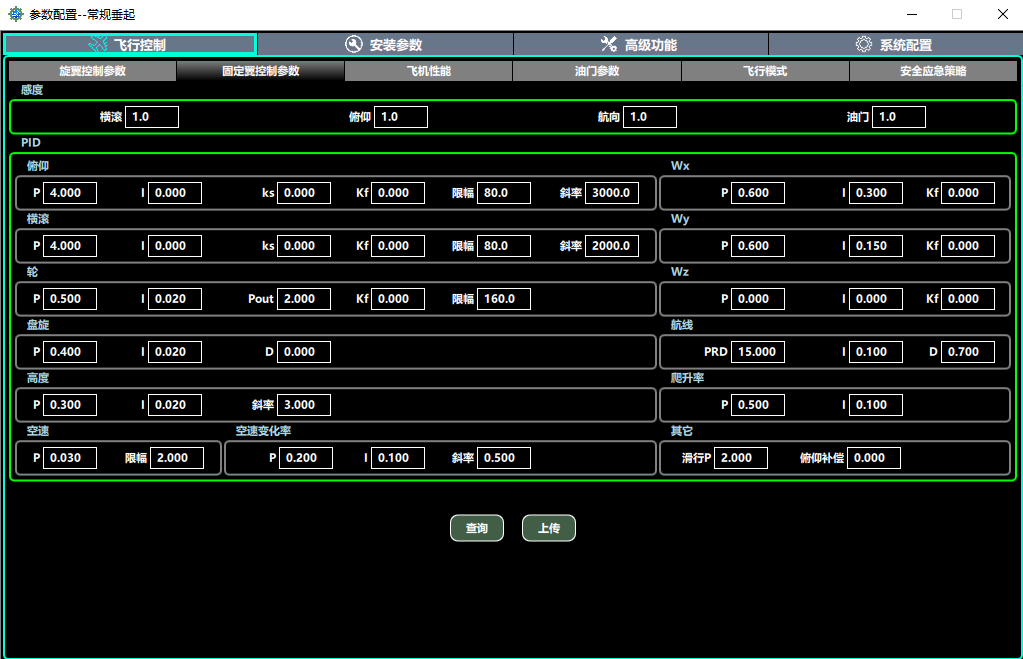
- “感度”栏参数及含义如下:
| 参数名称 | 含义 | 备注 |
|---|---|---|
| 横滚 | 调整横滚方向姿态控制感度 | 默认为 1,最小调整量 0.1 |
| 俯仰 | 调整俯仰方向姿态控制感度 | 默认为 1,最小调整量 0.1 |
| 航向 | 调整航向角锁定感度 | 默认为 1,最小调整量 0.1 |
| 油门 | 调整油门通道的控制感度 | 默认为 1,最小调整量 0.1 |
注意:
-
飞机空中飞行测试时,打舵 察调整的效果。
-
感度调整步长的每次调整不要超过 0.2。按照修改->试飞->降落->修改的步骤循环进行调整,直到将飞机状态调整到合适。
-
"PID"栏常用参数及含义如下:
| 参数 | P(增益) | I(积分) | kf(前馈) | 限幅 |
|---|---|---|---|---|
| $Wx$ | 调节俯仰转动角速度控制的强弱 | 消除俯仰转动角速度持续误差 | 舵面角度的显示 | |
| $Wy$ | 调节横滚转动角速度控制的强弱 | 消除横滚转动角速度持续误差 | 舵面角度的显示 | |
| $Wz$ | 调节偏航转动角速度控制的强弱 | 消除偏航转动角速度持续误差 | ||
| 俯仰 | 调节俯仰控制强弱 | |||
| 横滚 | 调节横滚控制强弱 | |||
| 轮 | 调节轮的控制强弱 | 消除控制的持续误差 | ||
| 盘旋 | 调节盘旋时的压线强弱 | |||
| 航线 | 调节直线飞行时的控制强弱 | |||
| 高度 | 调节高度控制强弱 | |||
| 爬升率 | 调节爬升速度控制强弱 | |||
| 空速 | 调节空速的控制强弱 | |||
| 空速变化率 | 调节油门的变化的快慢 |
飞机性能¶
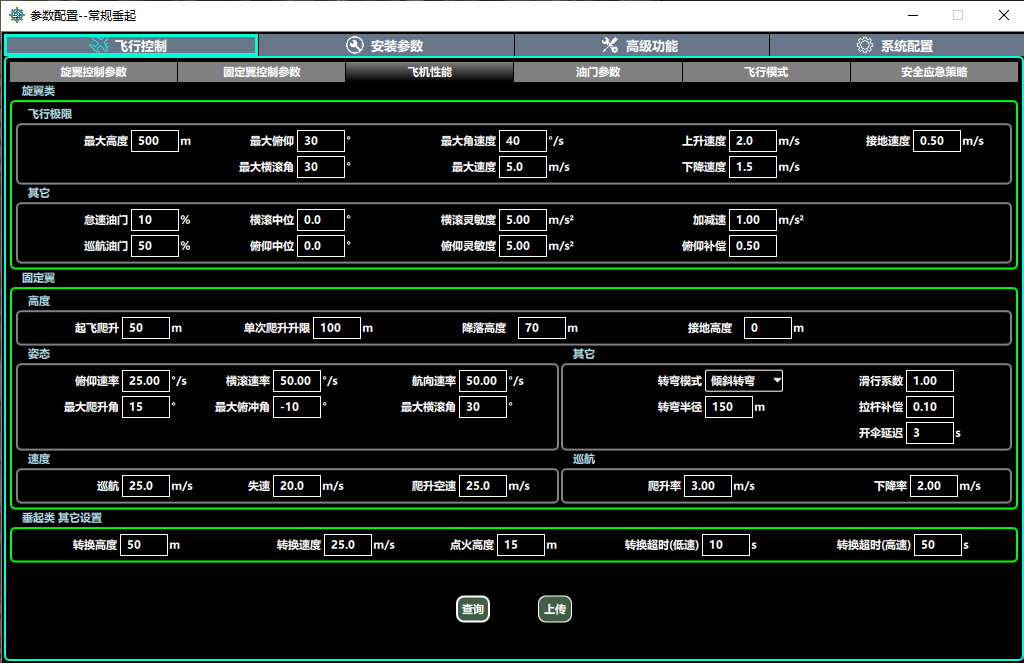
- 飞机性能界面“旋翼类-飞行极限”参数及含义如下所示:
| 参数名称 | 含义 | 备注 |
|---|---|---|
| 最大高度 | 最大高度限制 | 增稳和自主模式下生效 |
| 最大俯仰角 | 飞机飞行最大目标俯仰角(单位:度) | 在所有飞行模式下生效 |
| 最大横滚角 | 飞机飞行最大目标横滚角(单位:度) | 在所有飞行模式下生效 |
| 最大角速度 | 航向转动最大目标角速度(单位:度每秒) | 在所有飞行模式下生效 |
| 最大速度 | 飞控允许飞机最大目标水平速度(单位m/s) | 增稳和自主模式下生效 |
| 上升速度 | 飞控允许飞机最大的目标上升速度(单位m/s) | 增稳和自主模式下生效 |
| 下降速度 | 飞控允许飞机最大的目标下降速度(单位m/s) | 增稳和自主模式下生效 |
| 接地速度 | 自主降落第二阶段的目标速度(单位m/s) | 自主降落第二阶段生效 |
注意:
-
飞行极限栏的参数,根据实际飞行需要调整,但同时要保证留够控制余量。建议最大姿态角不要小于15°,不超过30度。
-
飞机性能界面“旋翼类-其它”参数及含义如下所示:
| 参数名称 | 含义 | 备注 |
|---|---|---|
| 怠速油门 | 解锁后油门杆低于10%时输出怠速油门 | |
| 巡航油门 | 飞机悬停时的参考油门 | 默认为50(50%油门) |
| 横滚中位 | 调整飞机横滚的控制中位(单位:度) | 正数使飞机右滚 |
| 俯仰中位 | 调整飞机俯仰的控制中位(单位:度) | 正数使飞机抬头 |
| 横滚灵敏度 | 调整增稳模式下左右飞行时启动和停止的加减速 | 单位为m/s^2^ |
| 俯仰灵敏度 | 调整增稳模式下前后飞行时启动和停止的加减速 | 单位为m/s^2^ |
| 加减速 | 调整自主飞行时的加减速 | 单位m/s^2^ |
| 俯仰补偿 | 固定翼转换为旋翼模式时俯仰的补偿系数 |
提示:
-
巡航油门为手动模式下脱离地效悬停时的油门平均值,是给飞控的参考值,飞行时根据实际情况调整。
-
横滚中位、俯仰中位为控制中位,是指手动模式悬停位置基本不变情况下的姿态角,默认都为0,飞行时根据实际情况调整。
-
飞机性能界面“固定翼”参数及含义如下所示:
| 参数名称 | 含义 | 备注 | |
|---|---|---|---|
| 高度 | 起飞爬升 | 增稳-固定翼模式高度高于此参数油门为空速控制,一般和转换高度保持一致 | |
| 单次爬升升限 | 盘旋时单次爬升的高度 | ||
| 降落高度 | 飞机执行降落操作的高度,默认生成L点的高度 | ||
| 接地高度 | 起降点有高差时使用,接地高度=降落点海拔-起飞点海拔 | ||
| 姿态 | 俯仰速率 | 俯仰角度变化快慢 | 单位:°/s |
| 横滚速率 | 横滚角度变化快慢 | ||
| 航向速率 | 方向角度变化快慢 | ||
| 最大爬升角 | 飞行的最大爬升角 | 仅增稳、自主模式有效 | |
| 最大俯冲角 | 飞行的最大俯冲角 | ||
| 最大滚转角 | 飞行的最大滚转角 | ||
| 速度 | 巡航 | 巡航空速大小 | 单位:m/s |
| 失速 | 飞机的失速速度 | ||
| 爬升空速 | 爬升时的目标空速 | ||
| 巡航 | 爬升率 | 最大的目标上升速度 | 单位:m/s |
| 下降率 | 最大的目标下降速度 | ||
| 其他 | 转弯模式 | 默认副翼转弯 | |
| 转弯半径 | 根据飞机飞行性能填写转弯半径,单位m | ||
| 滑行系数 | 当降落阶段,飞机距离降落点L距离(单位m)=滑行系数*转弯半径时,飞机会启动旋翼 | ||
| 拉杆补偿 | 飞机转弯掉高时,调整拉杆参数 | ||
| 开伞延迟 | 当油门为0时,执行开伞动作时的延迟时间,仅有降落伞时生效 | 单位:s | |
| 起飞 | 速度 | 起飞/起控的判断条件 | |
| 加速度 | 起控的判断条件 | ||
| 舵面延时 | 经过检测条件后,开始响应命令 | 仅弹射机型 | |
| 推力延时 | |||
| 起飞前最大油门 | 允许起飞前输出最大油门 |
- 飞机性能界面“垂起类其他设置”参数及含义如下所示:
| 参数名称 | 含义 | 备注 |
|---|---|---|
| 转换高度 | 自主飞行时旋翼起飞到此高度开始向固定翼转换 | |
| 转换速度 | 旋转固时空速持续超过此空速将停止旋翼转动 | |
| 点火高度 | 旋翼自主起飞到此高度自动发送点火指令 | 仅勾选油动发动机和 油门自启动时生效 |
| 转换超时 (低速) |
若旋转固时超过此时间空速没有达到转换速度的一半,将停止转换 | |
| 转换超时 (高速) |
若旋转固时超过此时间空速没有达到转换速度,将停止转换 |
油门参数¶
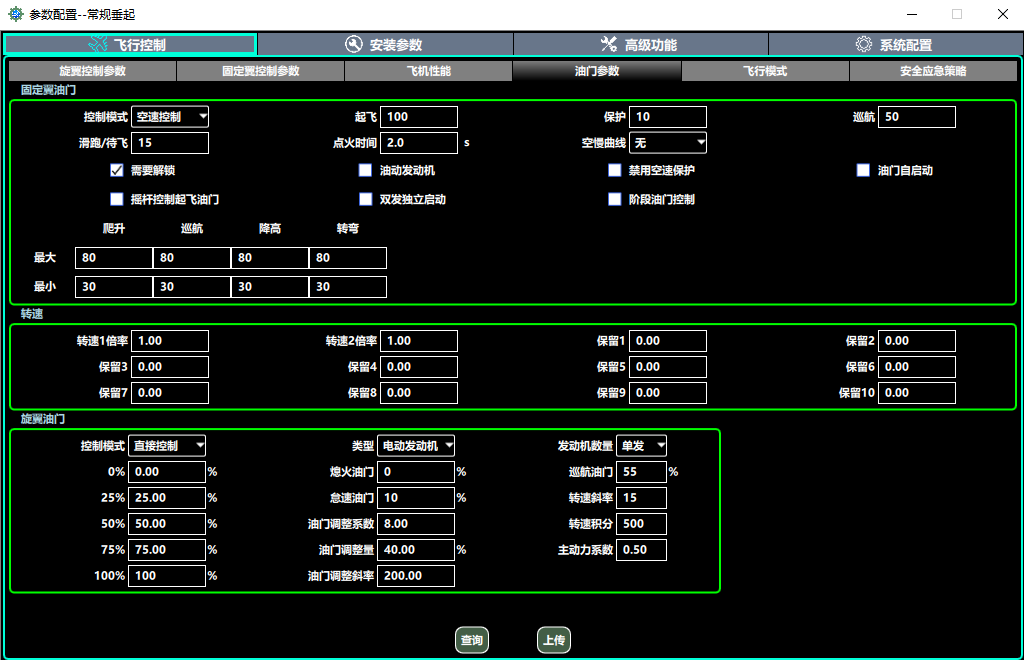
油门参数界面“固定翼油门”参数及含义如下所示:
| 参数名称 | 含义 | 备注 |
|---|---|---|
| 控制模式 | 油门控制方式,默认为空速控制 | |
| 起飞 | 限制增稳、自主模式下空速控制过程中的最大油门值 | |
| 保护 | 怠速油门大小,根据实际情况设置 同时限制增稳、自主模式下空速控制时的最小油门值 |
|
| 巡航 | 巡航平飞时参考的油门值,根据实际情况设置 | |
| 滑跑/待飞 | 无实际意义 | |
| 点火时间 | 油动发动机时,点火的持续时间 | |
| 空慢曲线 | 无实际意义 | |
| 需要解锁 | 默认不勾选,若需要解锁可以勾选(双击一次“起飞”固定翼油门才会输出) | |
| 油动发动机 | 若动力类型为油动发动机则勾选,电动不勾选 | |
| 禁用空速保护 | --- | |
| 油门自启动 | 若油动发动机的电启动继电器接入飞控,则勾选 | |
| 双发独立启动 | --- | |
| 摇杆控制起飞油门 | --- | |
| 阶段油门控制 | --- |
-
转速1、2倍率:飞控转速测量通道倍率;例:当发动机转速为6000,转速倍率为2时,地面站软件显示的转速为3000。
-
旋翼油门:无实际意义。
飞行模式¶
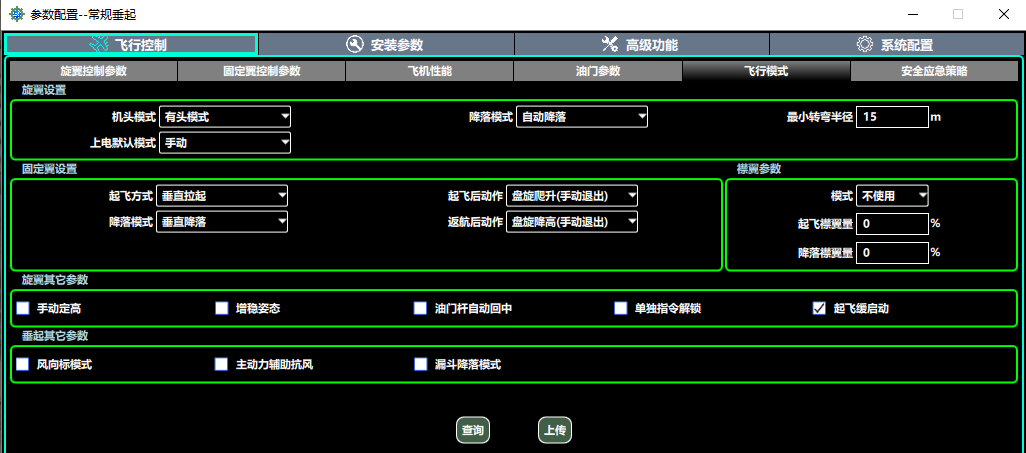
- 飞行模式界面“旋翼设置”参数及含义如下所示:
| 参数名称 | 含义 | 备注 |
|---|---|---|
| 机头模式 | 选择飞机机头模式 | 无头模式仅在增稳和自主模式下起作用 |
| 上电默认模式 | 飞控默认飞行模式 | 当有遥控器为控制源时,飞行模式听从遥控器 |
| 降落模式 | 选择飞机降落模式 | ①选择为“自主降落”,则飞机返航到降落点后,自主降落; ②选择为“降落点悬停”,飞机在返航到降落点后悬停等待。 |
| 最小转弯半径 | 飞机最小转弯半径 | 实际飞行时根据设定横滚角进行自动调整保证飞行顺畅 |
- 飞行模式界面“固定翼设置”参数及含义如下所示:
| 参数名称 | 含义 | 备注 |
|---|---|---|
| 起飞方式 | 根据飞机类型设置起飞方式 | 垂直拉起 |
| 降落方式 | 根据飞机类型设置降落方式 | 垂直降落 |
| 起飞后动作 | 选择飞机起飞后动作 | 切换到工作航线:认O1点高度飞行,不盘旋 爬升到工作高度:认O1点高度飞行,不盘旋 盘旋爬升(手动退出):在O1点盘旋,到高度后需手动点击盘旋结束 盘旋爬升(自动退出):在O1点盘旋,到高度后自动退出盘旋圈 |
| 返航后动作 | 选择飞机返航后动作 | 自动降落:O2点不盘旋降高 盘旋降高(手动退出):在O2点盘旋,到高度后需手动点击盘旋结束 盘旋降高(自动退出):在O2点盘旋,到高度后自动退出盘旋圈 |
- 飞行模式界面其他参数及含义如下所示:
| 参数名称 | 含义 | 备注 |
|---|---|---|
| 襟翼参数 | 模式 | --- |
| 起飞襟翼量 | --- | |
| 降落襟翼量 | --- | |
| 遥控定高 | 旋翼-手动模式下,油门杆回中后锁定当前高度 | |
| 增稳姿态 | 旋翼-增稳模式下横滚、俯仰为角度控制 | |
| 油门杆自动回中 | 支持油门杆自回中的遥控器 | |
| 单独指令解锁 | --- | |
| 起飞缓启动 | 勾选后起飞阶段油门变化更加缓慢 | |
| 风向标模式 | 勾选后在旋翼-自主降落阶段,在大风场景下会失锁航向,直到方向舵小后继续锁定,位置一直锁定。 | |
| 主动力辅助抗风 | 固定翼动力辅助抵消前向来风 | 增稳、自主模式生效 |
| 漏斗降落模式 | --- |
注意:
-
建议使用该界面的默认参数,请勿随意更改。如需修改,请先咨询翔仪技术人员。
-
“增稳姿态”、“油门杆自回中”、“遥控定高”、“风向标模式”、“主动力辅助抗风”、“漏斗降落模式”参数,请勿随意更改。
安全应急策略¶
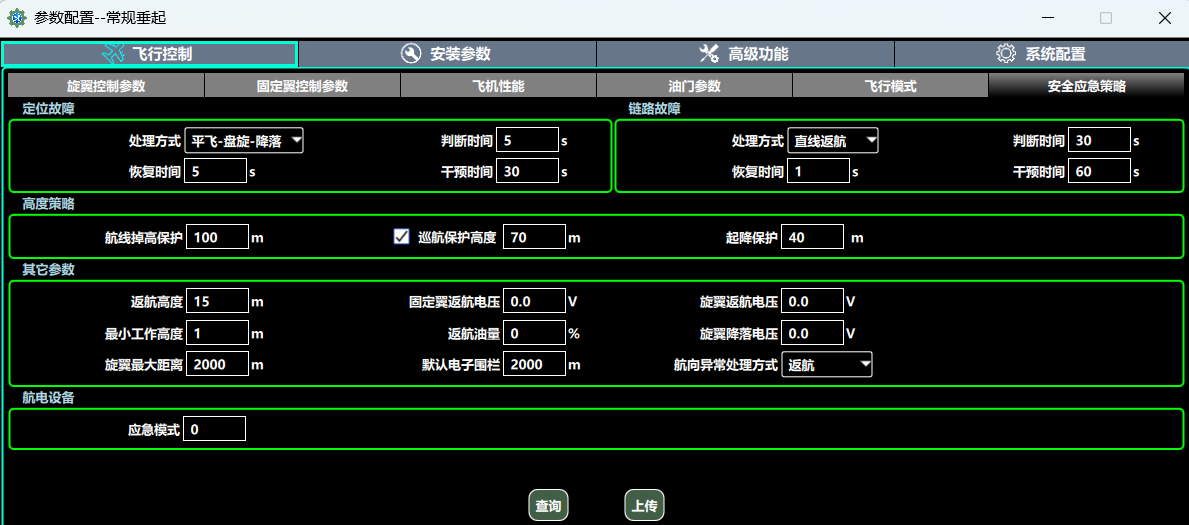
- 应急参数用于设置飞控应急相关功能,默认的应急参数含义如下所示:
| 类别 | 参数 | 含义 |
|---|---|---|
| 定位故障 | 处理方式 | 选择定位失效后飞控的应急方式 |
| 判断时间 | 持续定位失效超过此时间即判断为定位故障 | |
| 恢复时间 | 定位恢复后,持续超过此时间,即判断定位恢复 | |
| 干预时间 | 判断定位故障后,等待恢复的时间。超时后,将执行定位故障应急操作 | |
| 链路故障 | 处理方式 | 选择上行链路断开后,飞控采取的应急措施(返航或者继续任务) |
| 判断时间 | 链路断开后,持续此时间仍未恢复,则判断链路已故障 | |
| 恢复时间 | 链路恢复后,持续此时间都正常,则判断链路已恢复 | |
| 干预时间 | 判断链路故障后,等待恢复的时间。超时后,将采取应急措施 | |
| 高度策略 | 航向掉高保护 | 巡航阶段飞机飞行低于航线该高度启动保护 |
| 巡航保护高度 | 巡航过程中航线的最低保护高度 | |
| 起降保护 | 飞机在起降阶段低高度应急的参考高度 | |
| 其它参数 | 返航高度 | 旋翼状态非正常返航时的判断高度 |
| 最小工作高度 | 飞机在自主模式下最小飞行高度 | |
| 旋翼最大距离 | 旋翼最大飞行距离,应急时距离参考 | |
| 固定翼返航电压 | 固定翼-自主模式下,返航电压应急的阈值 | |
| 返航油量 | 自主模式下,应急返航的油量 | |
| 默认电子围栏 | 飞控定位后生成的圆形电子围栏大小,默认2000m | |
| 旋翼返航电压 | 旋翼-自主模式下,返航电压应急的阈值 | |
| 旋翼降落电压 | 旋翼-自主模式下,降落电压应急的阈值 | |
| 航向异常处理方式 | 航向异常工作后的应急方式 | |
| 航电设备 | 应急模式 | 航电设备应急处理,定制功能 |
注意:
- 与飞行应急保护相关的参数,请根据实际任务工况、场地填写。
安装参数¶
“安装参数”界面在调试版地面站“参数配置”中打开,包含安装位置、多余度、遥控器配置、矩阵配置、通道输出、SBUS输出界面,各界面参数说明如下。
安装位置¶
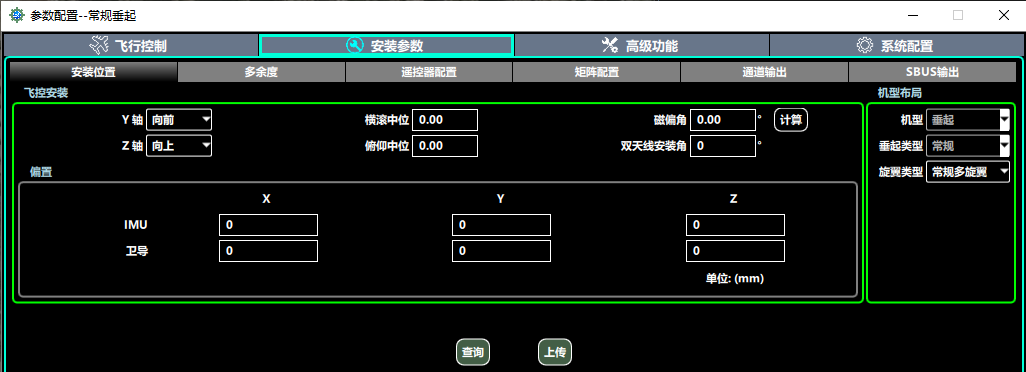
-
设置飞控安装方向
- 根据飞控外壳标注的 Y 轴、Z 轴标识,结合飞控在机体上的实际安装方向,完成对应参数设置。
注意:
-
参数修改后,需移动飞机做俯仰、横滚动作,验证机体实际姿态变化与地面站显示是否一致:低头时俯仰角为负、抬头时为正;左滚时横滚角为负、右滚时为正。
-
设置飞控安装中位
-
横滚中位、俯仰中位为飞控水平面与机体水平面的安装偏差修正参数,单位为度。
-
操作要求:将飞机置于水平状态(保证机体平面水平),通过调整该参数使地面站飞控姿态显示接近水平,误差需控制在±2 度以内 。
-
注意:
-
若飞控机械安装存在较大倾斜,不仅影响参数校准精度,还可能对减震效果造成影响,此类情况建议优先通过调整机械安装结构修正,而非单纯依赖参数补偿。
-
设置磁偏角
-
磁偏角参数初始可填写0,待进入起飞检查-航向检查环节时,根据实地检测结果重新填写精准数值。
-
磁偏角受磁罗盘安装精度、当地地理磁场环境影响,无固定参考值,需通过实际测试确认。
-
-
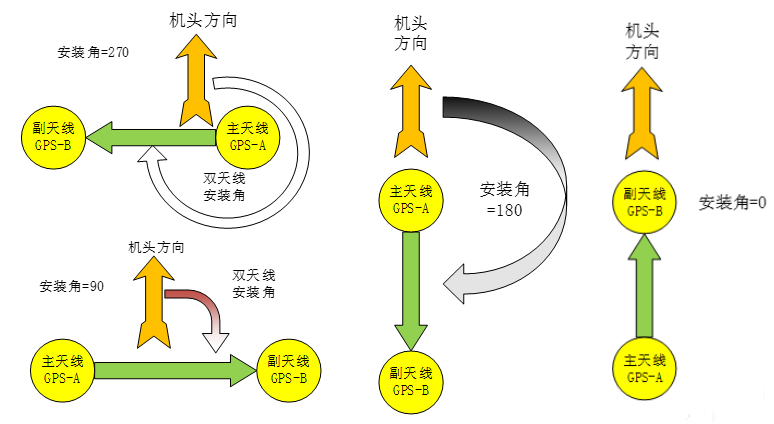
设置双天线安装角
- 若飞控配备双天线测向功能,需按规范测量方法完成双天线安装角参数填写;若无此功能,该参数保持默认值0即可。
-
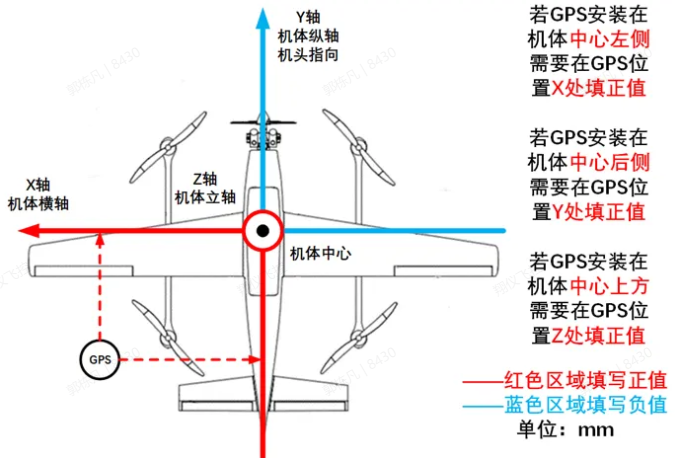
测量并填写 GPS 天线补偿坐标
-
以机体中心为坐标原点,GPS 位置修正坐标的正负定义规则如下,请按实际测量值填写:
-
X 轴:GPS 位于机体 X 轴左侧为正,右侧为负;
-
Y 轴:GPS 位于机体 Y 轴后方为正,前方为负;
-
Z 轴:GPS 位于机体 Z 轴上方为正,下方为负。
-
-
注意:
-
若飞控具备双天线定向功能,该坐标需以主天线实际位置为测量依据;
-
若飞控配备备用卫导功能,主、备用卫导天线需就近安装,可共用同一组 GPS 补偿参数;
-
若主、备用卫导天线间距过大,卫导切换时可能导致飞机姿态、位置出现异常波动,需严格控制安装间距。
-
测量并填写 IMU 补充坐标
-
以机体中心为坐标原点,IMU 位置修正坐标的正负定义规则如下,按实际测量值填写:
-
X 轴:IMU 位于机体 X 轴左侧为正,右侧为负;
-
Y 轴:IMU 位于机体 Y 轴后方为正,前方为负。
-
-
注意:
- 旋翼机机体尺寸较小时,若飞控安装位置与机体中心的偏离距离不超过50cm,可无需修正 IMU 坐标,直接填写0即可。
多余度¶

-
主控余度
-
多余度飞控系统时使用参数,请保持飞控当前默认参数,禁止修改;
-
如需调整时,请联系翔仪技术工程师支持。
-
-
组合导航
-
在机上有多个导航源时使用参数。
-
根据机上实际搭载的导航设备数量、实际使用的导航源,完成对应参数的填写。
-
在机上有多个导航设备的状态下,建议将数据源选择为冗余。
-
-
磁罗盘
-
数据源、总数:在机上有多个磁罗盘时使用参数。
- 根据机上实际搭载的磁罗盘数量、实际使用的磁航向数据源,完成对应参数填写。
-
磁罗盘1~3:根据磁罗盘外壳标注的机头指向标识,结合其在机体上的实际安装位置,修改对应参数中 Z 轴、Y 轴指向配置。
-
-
IMU、GNSS、空速、气压
- 根据机上实际搭载的设备数量、实际使用的设备数据源,完成对应参数填写。
遥控器配置¶

- 遥控器设置参数含义如下所示:
| 参数名称 | 含义 |
|---|---|
| 启用RC | 默认勾选此项,使用遥控器控制飞行器,不勾选则不使用遥控器 |
| 遥控器类型 | 选择遥控器通道数,默认14通道 |
| 基站SBUS | 是否启用基站接收机模式 |
| 通道序号 | 遥控器通道序号(根据遥控器类型变化,最大14通道) |
| 功能 | 配置遥控器通道对应的飞控功能(1-4、6通道不可更改) |
| 中位 | 设置遥控器通道中位值,RC界面中位不为零时,修改此值进行校准 |
| 最大值 | 设置遥控器通道最大值,RC界面最大值不准确时,修改此值进行校准 |
| 最小值 | 设置遥控器通道最小值,RC界面最小值不准确时,修改此值进行校准 |
| 方向 | 调整遥控器对应通道的极性 |
注意:
-
遥控器参数包括各通道的最大值、最小值、正反向设置及功能配置,默认无需修改。
-
若 RC 值显示不准确,需通过上述参数校准时,建议在翔仪技术人员协助下操作。
-
优先通过遥控器自身功能完成校准,非必要不修改飞控端参数。
矩阵配置¶
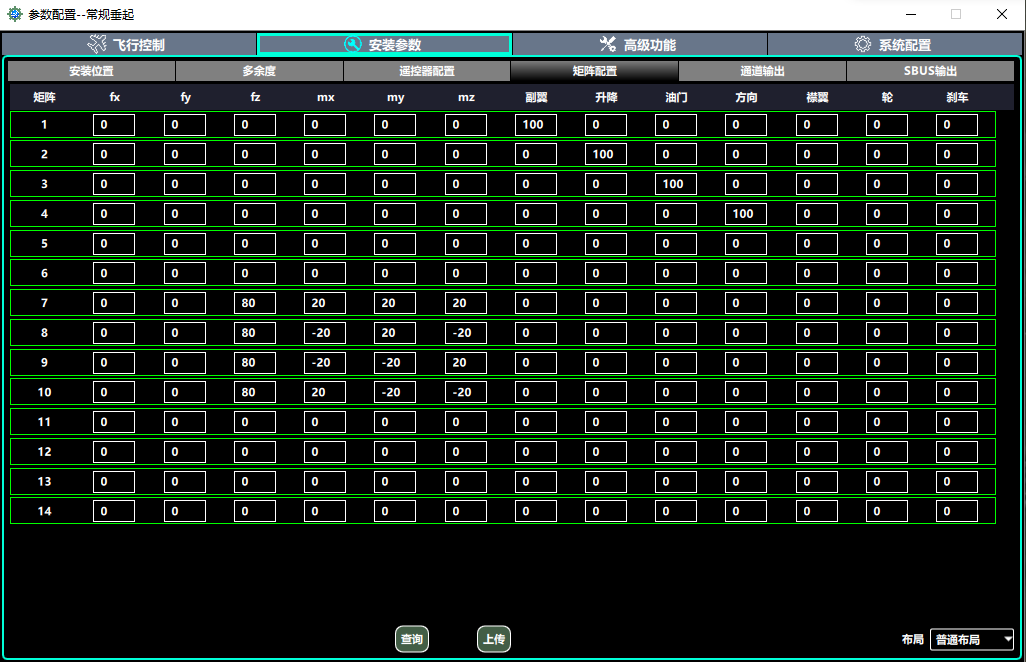
注意:
- 本界面参数直接影响飞行控制逻辑,对飞行安全至关重要,禁止修改,如需调整,请联系翔仪技术人员协助。
通道输出¶
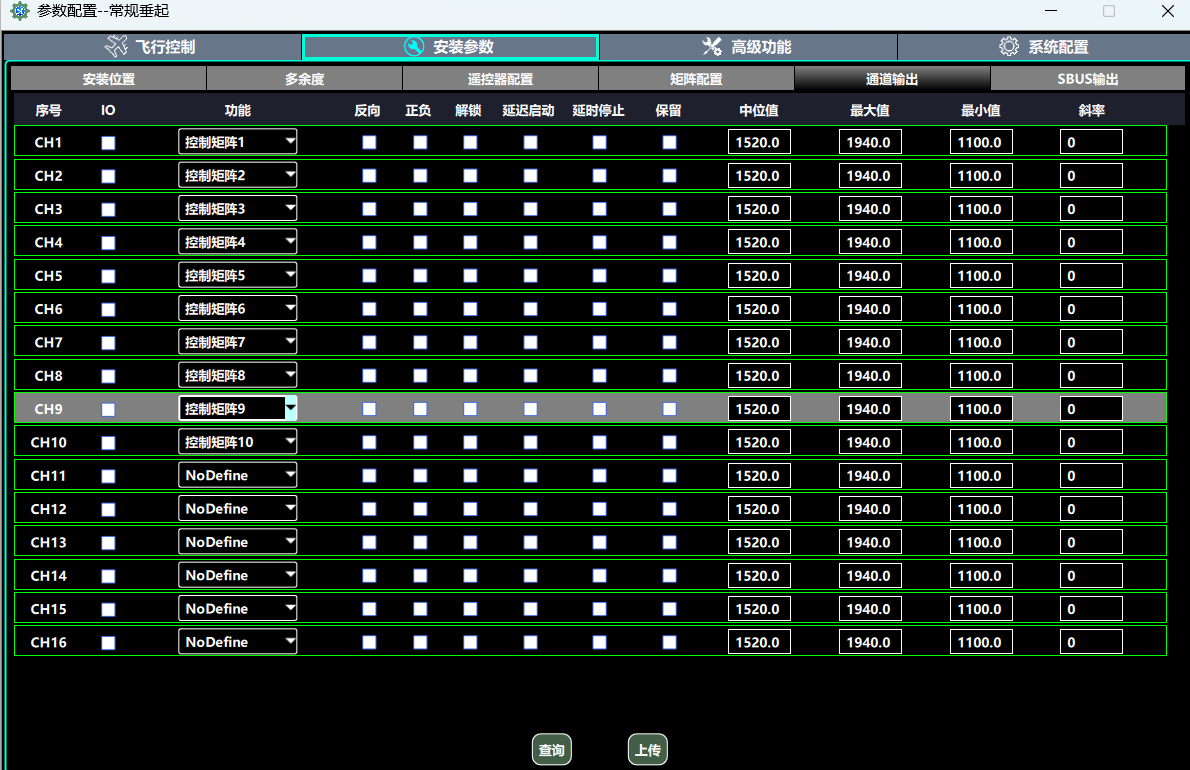
- 界面参数含义如下所示:
| 参数名称 | 含义 |
|---|---|
| 序号 | 飞控通道编号,共 16 个通道,需与飞控硬件实际通道匹配 |
| IO | 输出信号类型选择:默认不勾选为 PWM 信号,勾选为 IO 信号 |
| 功能 | 配置对应通道的实际控制功能 |
| 反向/正负 | 调整通道输出的反向逻辑及正负值,匹配被控设备(如舵机)动作方向 |
| 解锁 | --- |
| 中位 | 置通道输出中位值,匹配被控设备中位需求 |
| 最大值 | 设置通道输出最大值,限制被控设备最大行程 |
| 最小值 | 设通道输出最小值,限制被控设备最小行程 |
| 斜率 | 调整对应通道的控制输出斜率 |
注意:
-
本界面参数需严格根据飞机实际通道接线配置,填写错误会导致飞行器控制失效,引发飞行风险;
-
如需修改参数,请联系翔仪技术人员。
SBUS输出¶
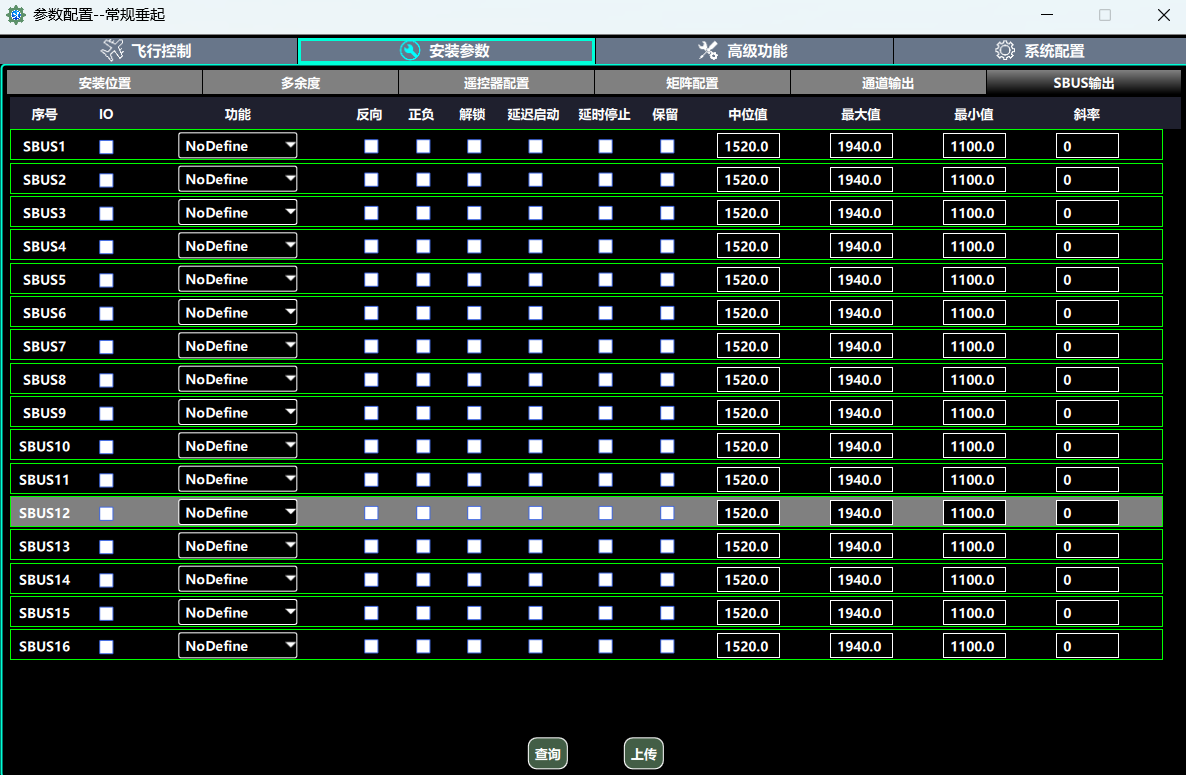
- SBUS输出界面所有参数的含义、设置要求与通道输出界面完全一致。
注意:
- 该界面的“是否IO”选项为预留功能不生效,请保持默认“不勾选”状态。
高级功能¶
“高级功能”界面在调试版地面站“参数配置”中打开,包含移动平台、激光高度、视觉&SLAM、其它。
移动平台¶
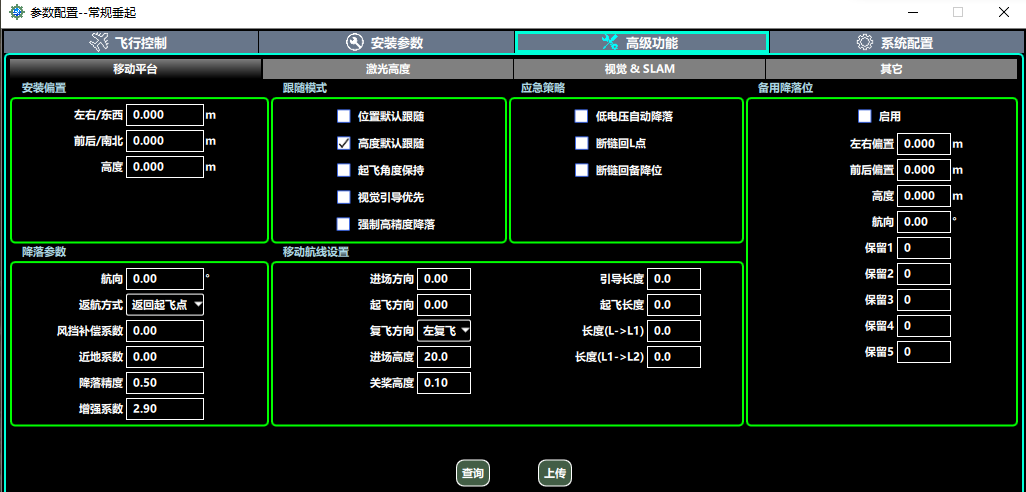
-
此界面参数为移动平台版本使用,使用说明参考《7.2 移动跟随》相关描述。
-
移动跟随版本飞控为特殊版本,标准飞控不支持此项功能,如需使用请联系翔仪商务经理获取最新技术方案。
激光高度¶
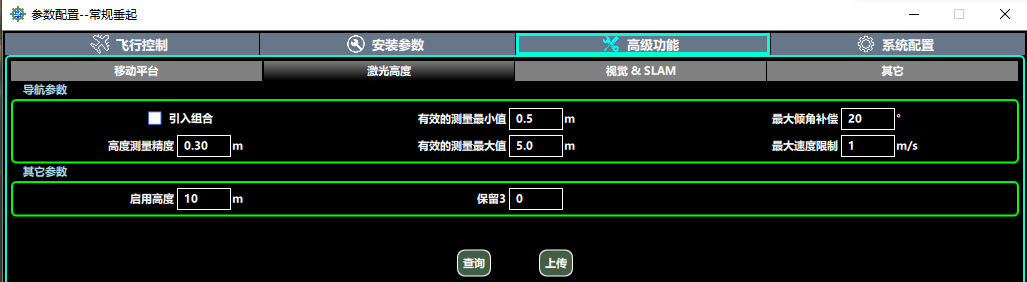
-
此界面为外接激光测距传感器,且将传感器数据引入组合导航时使用。
-
界面参数请保持默认,如需使用请联系翔仪技术人员。
视觉&SLAM¶
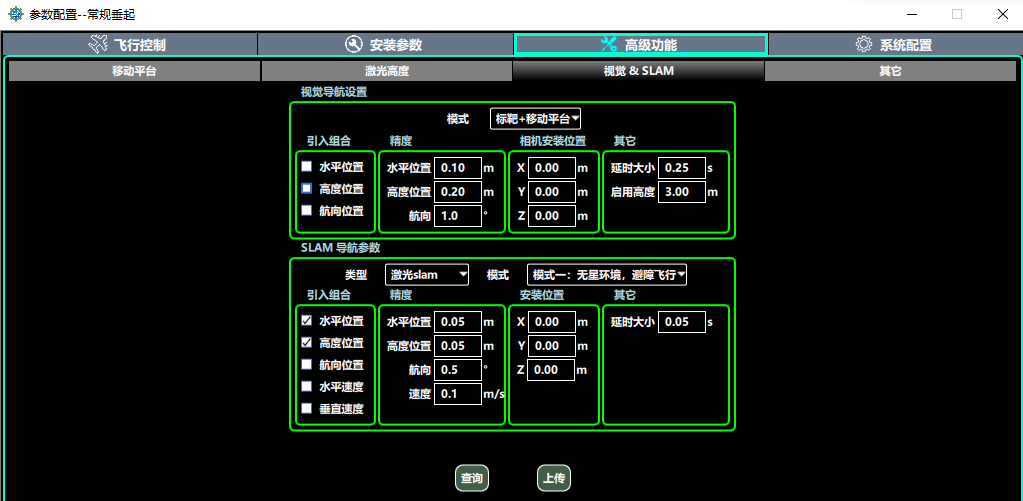
-
此界面为外接视觉/SLAM导航时使用参数,请保持默认。
-
使用该功能需要增加对应传感器,如需使用请联系翔仪商务经理。
其它¶
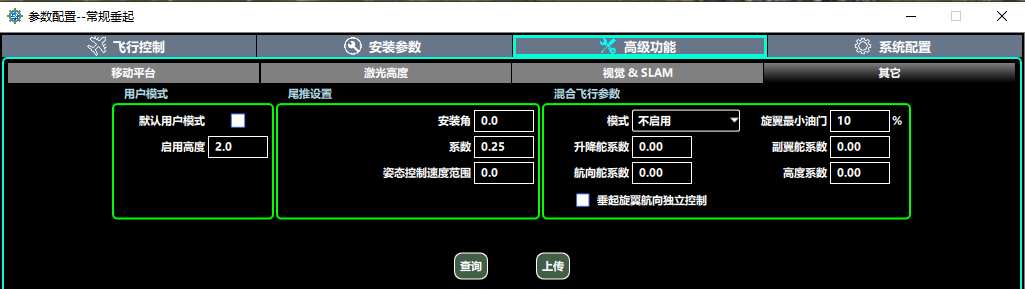
- 特殊功能使用参数,请保持默认。
系统配置¶
“系统配置”界面在调试版地面站“参数配置”中打开,包含版本信息、传输协议、硬件参数、接口配置、导航参数、数据交互配置、测试参数界面。
版本信息¶
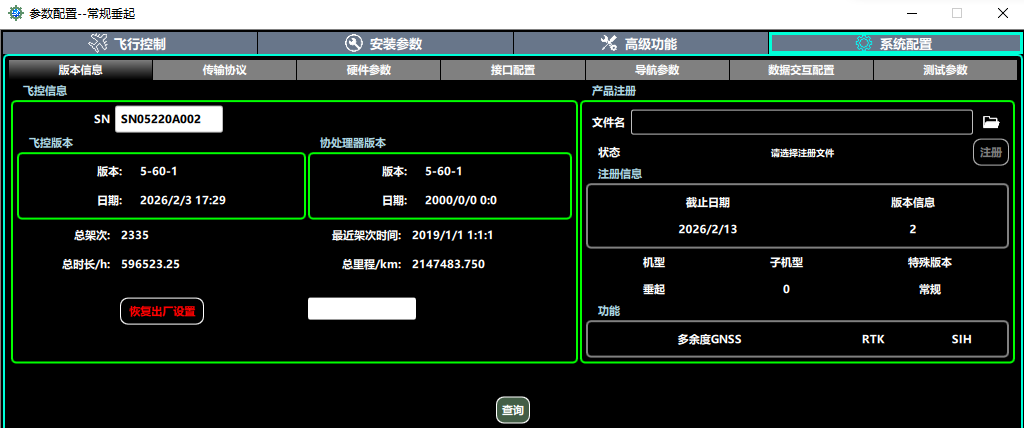
-
飞控信息
- 在此界面,可看到飞控序列号、飞控版本、协处理器版本、飞行总架次、最新架次时间、飞行总时长、飞行总里程等信息。
-
恢复出厂设置
-
该子界面提供飞控恢复出厂设置功能选项,操作及注意要求如下:
-
执行恢复出厂设置前,需确保飞控与地面站连接正常,且飞控数据更新无异常;确认后点击“恢复出厂设置”按钮,系统将启动恢复流程。
-
操作过程中需等待右侧进度条加载完成,待系统显示恢复出厂已完成提示,即表示恢复操作成功。
-
恢复出厂设置后,飞控所有参数将被重置为出厂默认状态,操作前需谨慎评估;确需执行此操作,建议在翔仪技术支持人员协助下完成后续参数调整。
-
-
-
产品注册
-
在此界面,可查看飞控注册截止日期、注册功能等信息。
-
如需进行飞控注册,点击右上文件图标,选择对应的注册文件,再点击“注册”按钮,即可完成飞控注册流程。
-
注意:
-
注册时,请确认注册文件SN号与飞控实际序列号保持一致;
-
若飞控已过期,注册之后飞控需要重新定位才会恢复。
传输协议¶

-
传输速率:可修改飞控遥测数据下传速率的参数,范围为0.1~20,常规工况下不建议小于5。
-
此界面其他参数请保持默认。
硬件参数¶
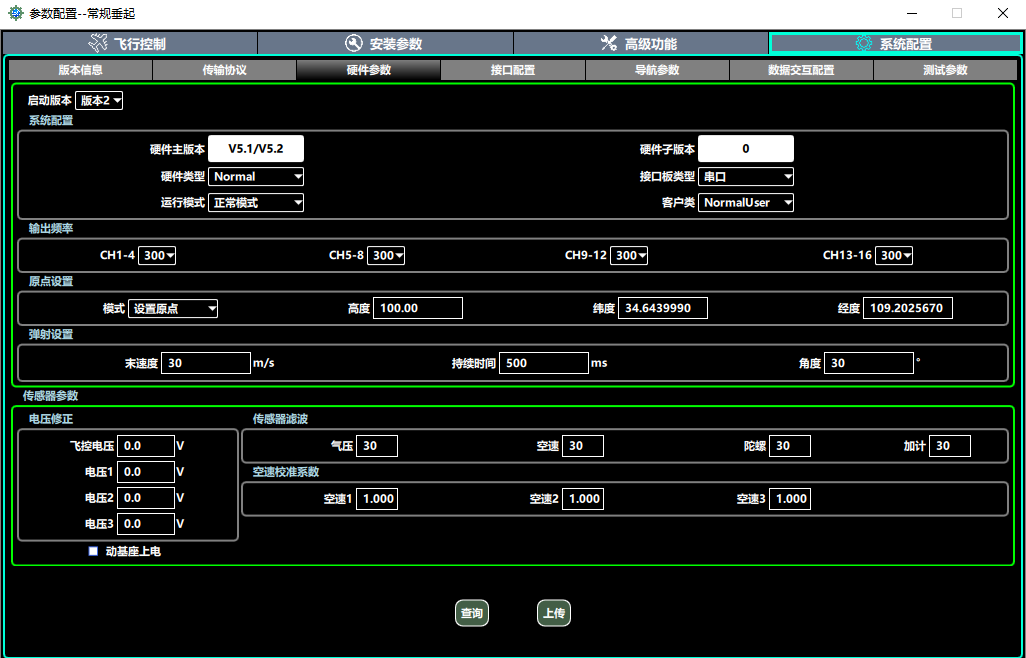
输出频率参数:可根据被控舵机的适配频率修改参数,通用配置标准为:数字舵机选择 300Hz,模拟舵机选择 50Hz,电调保持 300Hz。
其他参数:此界面其他参数请保持默认。
接口配置¶

注意:
- 此项参数出厂已经设置完成,请勿随意更改,填写错误会导致飞控工作异常。
导航参数¶

注意:
- 导航参数为飞控内部底层参数,设置错误会导致飞控工作异常,请勿自行修改。
数据交互配置¶
此界面参数为测试使用,无实际意义。
测试参数¶
此界面参数为测试使用,无实际意义。
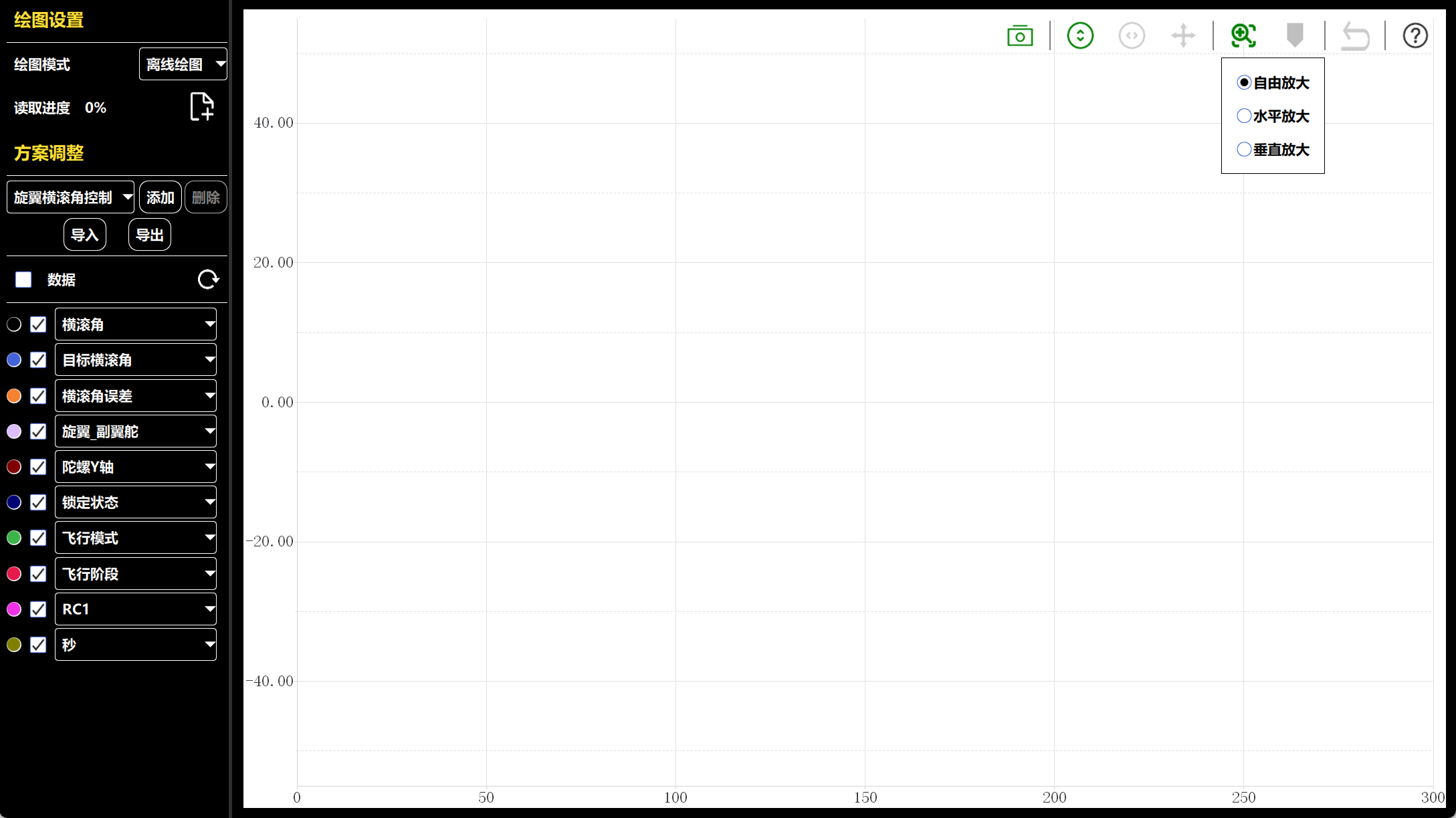
数据分析¶
“数据分析”功能由调试版地面站软件“ ”选择打开,该功能提供实时分析和离线分析两种模式,以下是详细说明:
”选择打开,该功能提供实时分析和离线分析两种模式,以下是详细说明:
-
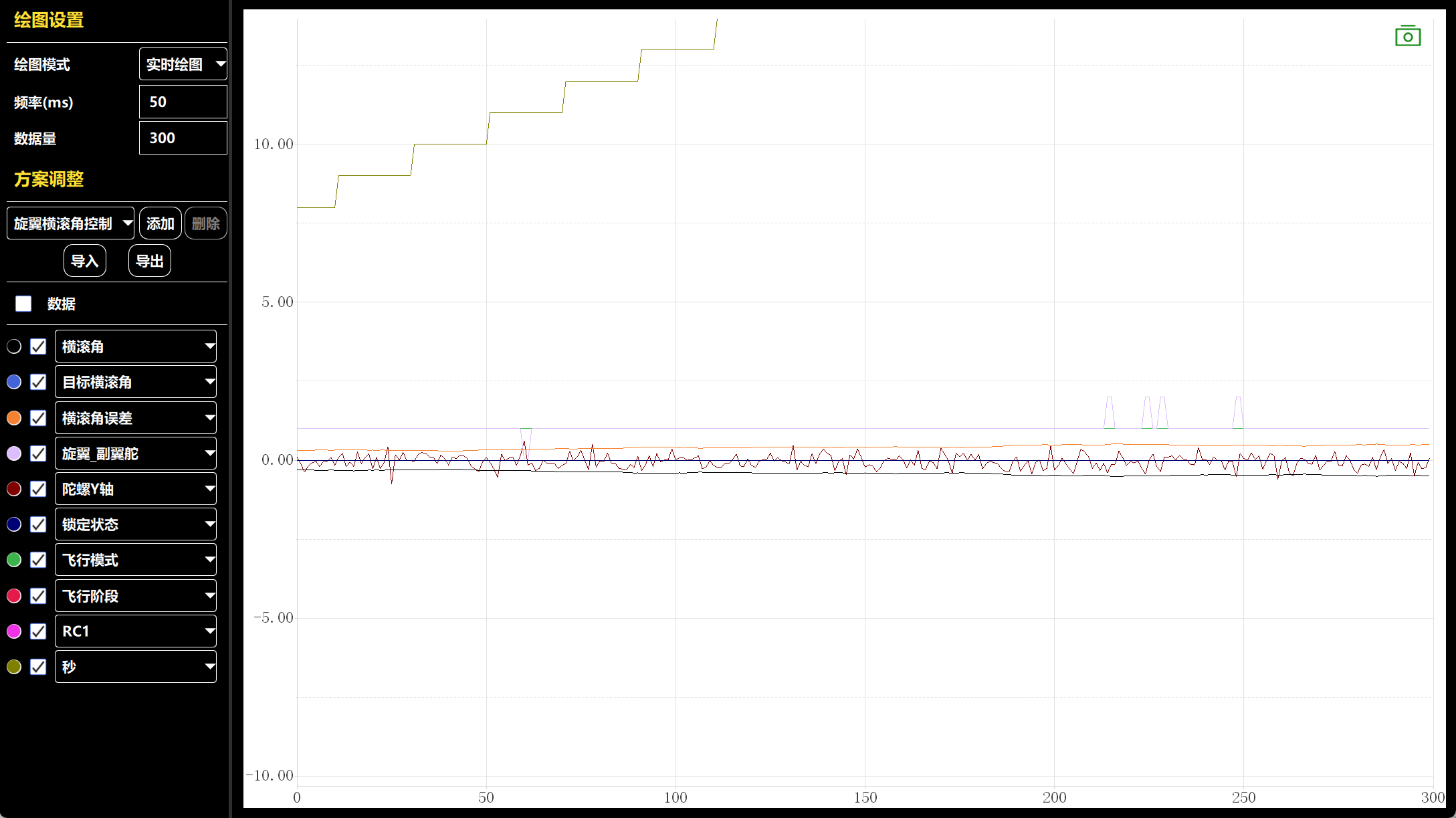
实时分析
- 绘图模式选择“实时分析”,主要用于飞行过程中需要调整参数的场景。在此功能下,用户可通过界面选择所需数据,实时监测各项参数,并清晰观察测量值曲线与目标值曲线的贴合情况,从而更有效地辅助工程师进行判断和调参。
-
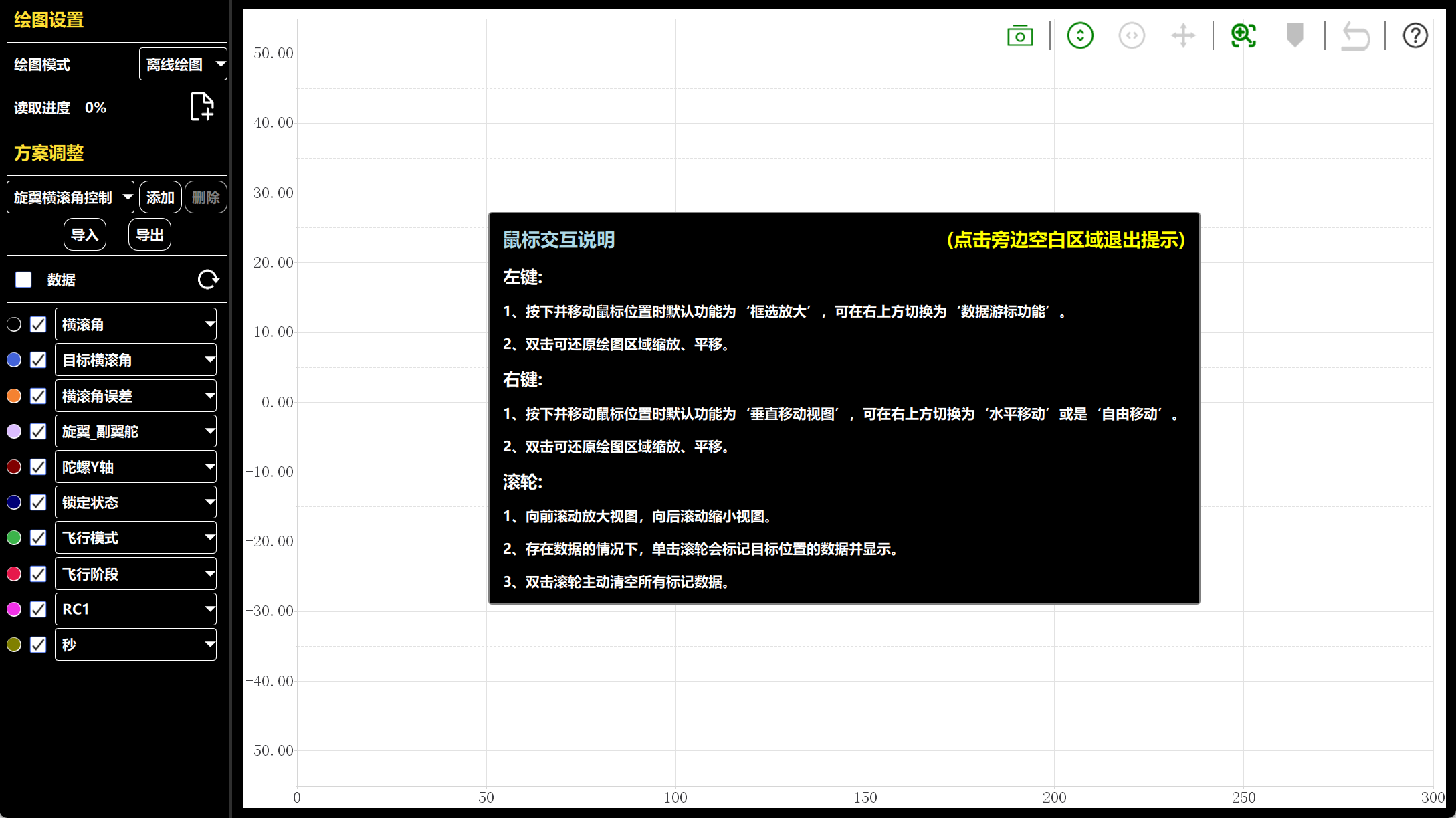
离线分析
- 绘图模式选择“离线分析”,这一功能通常在飞行任务结束后用于数据分析。飞行完成后,通过离线分析模式,可对记录的飞行数据进行详细而全面的解析,为后续飞行优化提供重要参考依据。
注意:
-
每个数据项可单独设置颜色、线宽、缩放、Y轴偏移,以下是对各项参数说明:
-
颜色:曲线的颜色;
-
线宽:曲线的粗细;
-
缩放:曲线的放大、缩小;
-
Y轴偏移:曲线基于当前位置的上/下移动;
-
小数位数:数据显示几位小数。
-
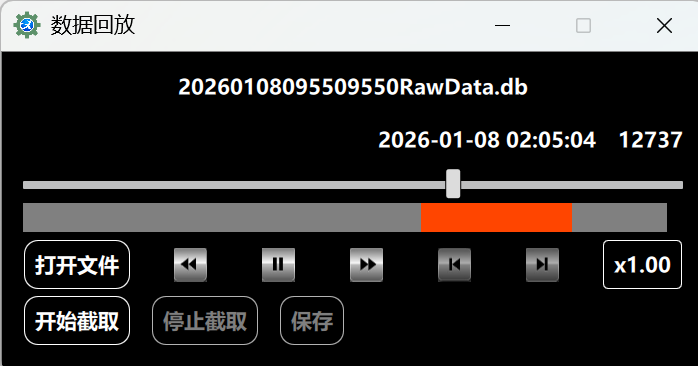
回放¶
“回放”功能在调试版地面站软件“ ”打开,界面示意图如下:
”打开,界面示意图如下:

-
点击“打开文件”,选择地面站软件保存的飞行数据文件,飞行数据文件保存在地面站软件安装路径下。
-
回放界面各参数、按钮含义从上至下、从左到右依次为:
-
飞行数据名称(数据开始时间Rawdata.db);
-
数据当前帧时间(UTC时间);
-
进度条(可拖动、点选播放);
-
飞行状态显示(灰色-油门为0的时间段,红色-油门不为0的时间段,青色-飞行阶段变化);
-
“打开文件”按钮:打开飞行数据文件用于回放;
-
减速播放、暂停/开始、加速播放、上一帧、下一帧、播放倍率;
-
开始截取、停止截取、保存可在多组飞行数据中截取其中一组数据进行保存。
-
详细数据¶
“详细数据”界面可在调试版地面站软件“ ”打开,界面如下图所示:
”打开,界面如下图所示:

该界面展示飞控的详细数据信息,包含高频数据、卫星时间数据、组合导航位置数据、卫星状态数据、RC输入数据、摇杆输入数据以及PWM输出数据等多项详细信息。
指令历史¶
“指令历史”可在调试版地面站软件“ ”打开,如下图所示:
”打开,如下图所示:
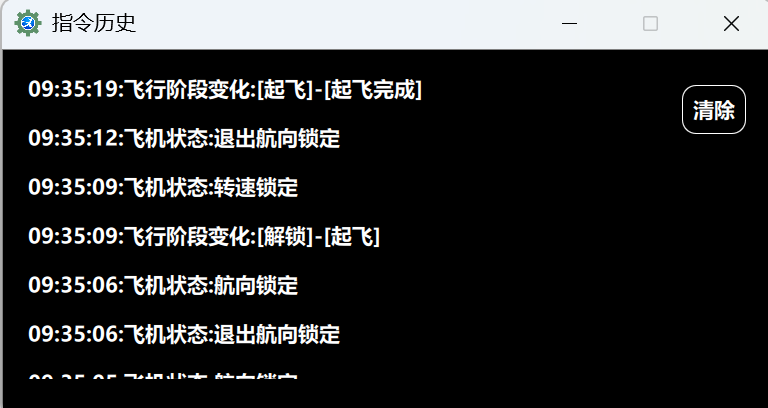
该界面是飞机飞行过程中,地面站发送的指令以及飞控状态的变化记录,包括下传的状态和已执行指令的存档。
用户设置¶
“用户设置”可在调试版地面站软件“ ”打开,如下图所示:
”打开,如下图所示:
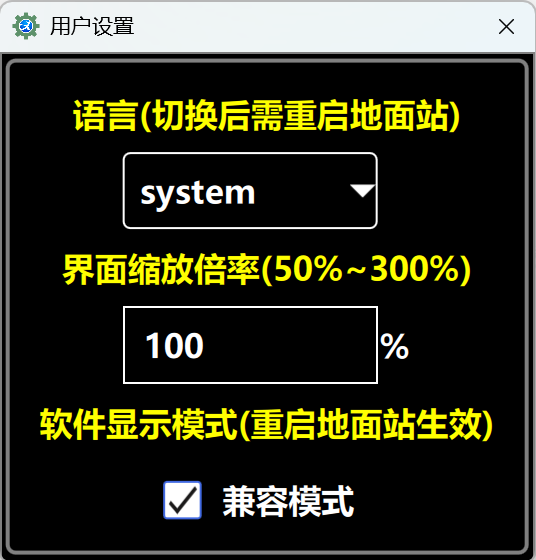
“用户设置”界面包含了语言、界面缩放倍率、软件显示模式选项,说明如下:
-
语言
-
默认为system。
-
可根据实际需求进行选择切换
-
-
界面缩放倍率
-
默认为100%,可根据实际使用需求进行调整。
-
这一功能充分照顾到不同用户的使用习惯和视觉需求。如果觉得界面元素过小,操作不便,或者希望更清晰地查看内容细节,可以适当增大缩放比例;相反,若想在一个屏幕内显示更多界面信息,则可以选择缩小缩放比例。
-
-
软件显示模式
- 在地面站使用时,界面布局、颜色搭配以及信息展示方式可能会有所不同,以适应不同场景的使用需求。
注意:
- 语言及软件显示模式需更改设置后需重启地面站才会生效。
模拟飞行¶
“模拟飞行”可在调试版地面站软件“ ”打开,如下图所示:
”打开,如下图所示:
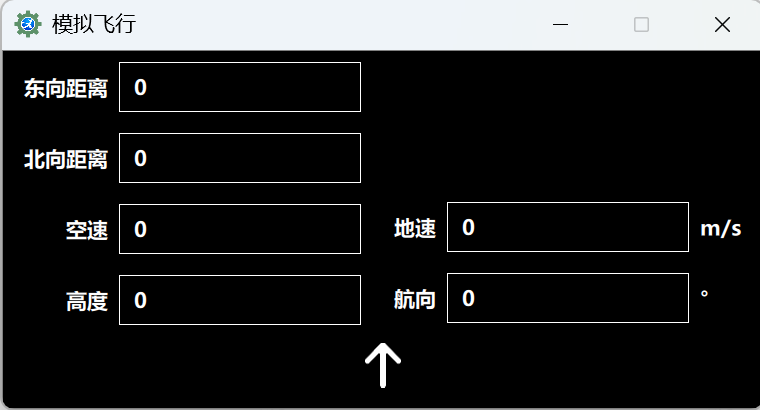
“模拟飞行” 功能支持手动向飞控注入导航信息,以此模拟飞机的飞行状态,界面参数介绍如下:
-
东向、北向距离:调整飞机相对当前位置的东向、北向偏移距离;
-
空速:修改飞控接收的空速测量值;
-
地速:调整飞控接收的地速测量值;
-
高度:修改飞控接收的高度测量值;
-
航向:调整飞控接收的航向测量值。
注意:
-
此功能仅可用于地面测试阶段的飞行逻辑验证,严禁在实际飞行中使用,否则可能导致飞机飞行状态异常,引发安全风险;
-
模拟飞行过程中,飞控仍会正常输出各通道控制量,开始测试前需断开飞机动力系统及执行机构的电源 / 信号。
-
此功能仅对飞控导航测量信息进行修改,模拟飞行时其他操作要求与正常飞行一致。
文件转换¶
“文件转换”可在调试版地面站软件“ ”打开,如下图所示:
”打开,如下图所示:
注意:
- 此功能为测试功能,无实际意义。
频谱分析¶
“频谱分析”可在调试版地面站软件“ ”打开,如下图所示:
”打开,如下图所示:
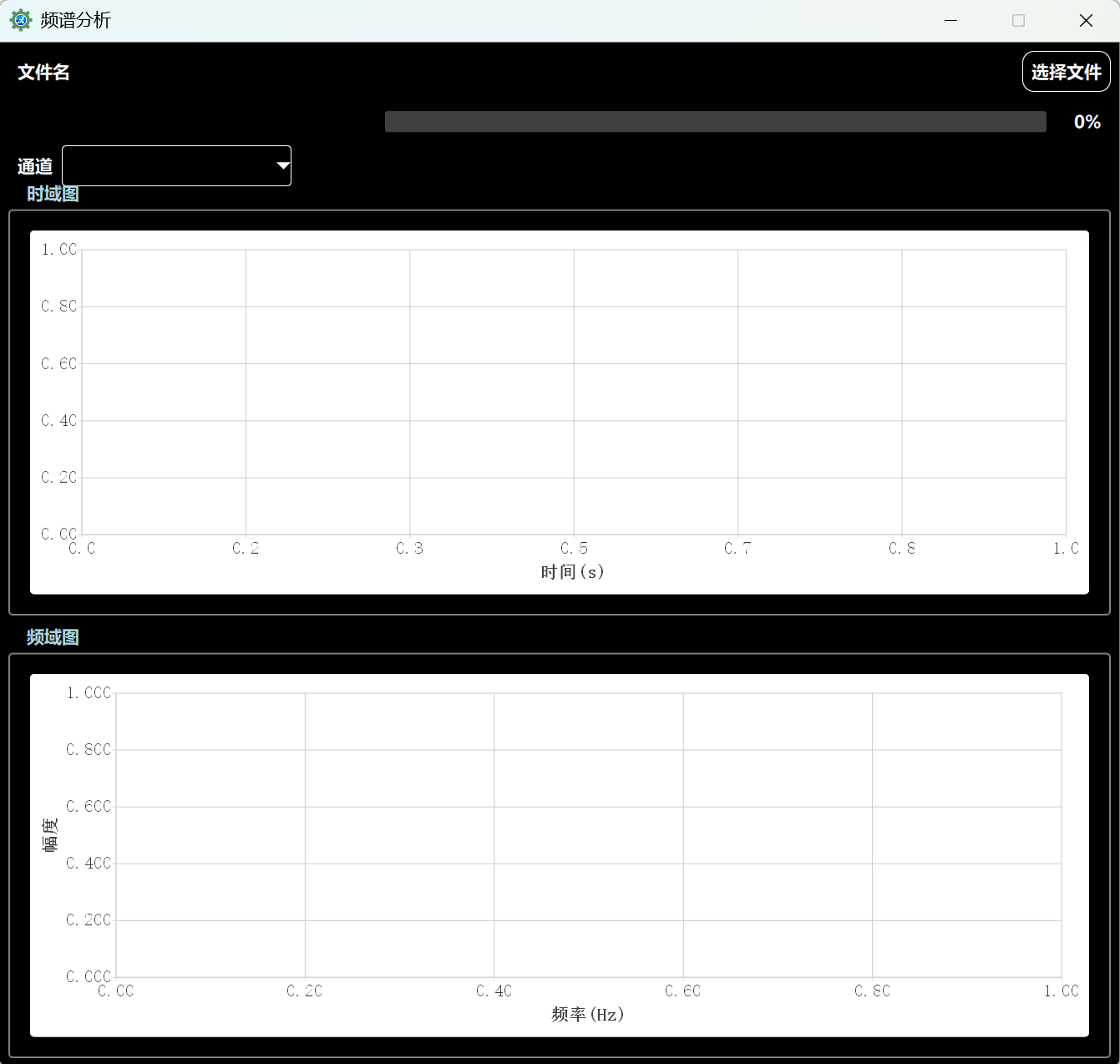
- 点击“选择文件”按钮,在电脑本地选择将数据记录仪存储的高频数据导入,待数据读取并加载完成后,进行绘图,可绘制频域、时域曲线。
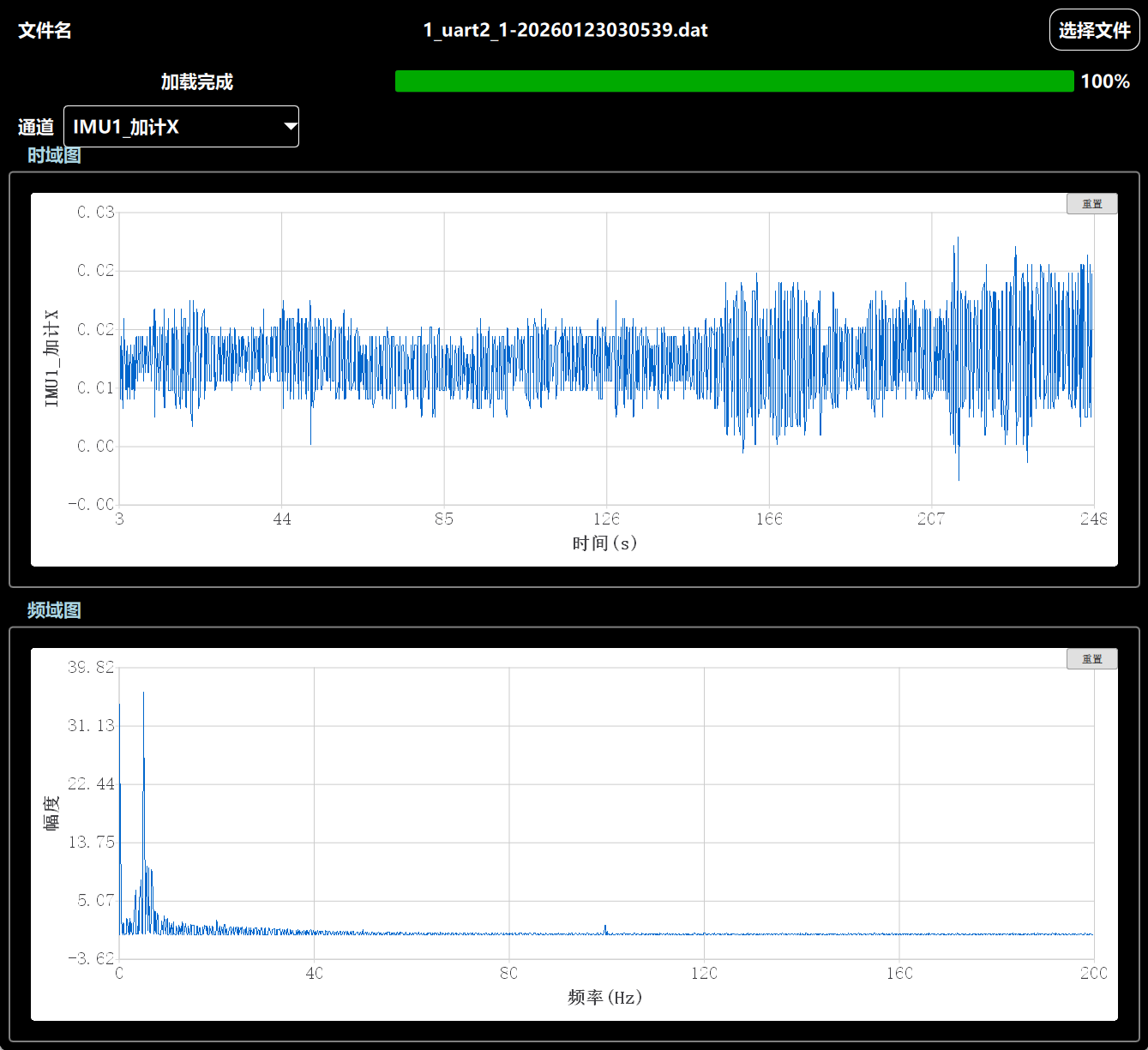
- 可在界面左上角“通道”处切换不同的数据源绘图。