飞行调试¶
概述¶
本章是无人机飞行调试的核心指南,涵盖从手动模式到全流程飞行的完整过程,严格遵循标准化流程是确保飞行安全和调试成功的关键;本章节介绍了飞行前准备、手动模式调试、增稳模式调试、自主模式调试及数据分析优化五个核心环节。
需要特别注意的是,所有飞行调试必须严格遵守当地法律法规和飞行管制要求,飞行调试前必须完成所有检查项目,不得简化或跳过,要根据实际飞行状态选择合适的飞行模式,操作人员在飞行过程中需密切关注无人机状态。
飞行前准备¶
-
首先按照地面站软件标准起飞检查流程逐一执行全步骤核查,具体操作详情参考《起飞检查》对应章节描述,确保基础起飞条件满足。
-
完成标准流程后,需进一步开展全系统详细检查,具体内容如下:
飞行平台检查¶
-
电机:电机座固定螺丝无松动、缺失;电机轴无弯曲、磨损,空载转动无卡顿、异响。
-
桨叶:桨叶无破损、变形、裂纹及明显划痕;安装牢固无松动,转动时无偏心晃动,桨叶与机身其他部件无干涉。
-
其他部件:电池、云台、传感器、天线等所有外设连接牢靠,接口无松动、线缆无破损,固定卡扣 / 扎带完好。
飞控系统检查¶
-
参数设置:地面站软件中,安装参数、飞行参数、应急参数等核心参数已按机型构型与任务需求正确配置并保存,无参数错乱或遗漏。
-
通信连接:遥控器与无人机接收机完成对频,信号强度稳定,无丢包、延迟现象;地面站与飞控数据传输正常,遥测信息实时更新。
-
卫星定位:GNSS星数正常,定位精度达标,无跳星、失锁情况,可正常输出稳定坐标信息。
场地条件核查¶
-
起降场地:以起降点为中心,半径≥50m 范围内无人员、建筑、树木、线缆等障碍物;场地平整、干燥,无碎石、积水或松软泥土;远离高压线、变电站、机场、通信基站等强电磁干扰源及国家规定的禁飞 / 限飞区域。
-
净空条件:飞行空域无低云、大雾、沙尘等影响视线的天气,能见度≥1km;无强风(风速≤6m/s)、雷雨、冰雹等恶劣天气,无鸟类集群或其他飞行器活动。
-
人员安全:起飞前确认所有无关人员撤离至飞行区域≥10m 外,禁止非操作人员进入起降核心区;操作人员需穿戴头盔、防护手套等防护装备,做好个人安全防护
其他关键注意事项¶
-
飞行保护:初次飞行测试需加装保护措施,可采用地面系留、吊飞测试或加装防倾杆等方式;待姿态控制稳定、无异常后,再移除保护措施开展后续全功能测试。
-
应急准备:提前制定详细应急预案,明确飞行中出现动力故障、通信中断、定位丢失等异常情况时的故障响应流程、紧急迫降区域、人员疏散路线及设备回收方案。
注意:
-
起飞检查需严格按地面站标准流程与上述补充内容逐一核查,所有项目均无异常后,方可启动飞行调试。
-
初次飞行前,建议通过《2.2 飞行模式》详细了解各种飞行模式的控制逻辑,避免操作失误。
手动模式调试¶
手动模式是基础飞行模式,需通过调试确保飞机姿态控制精准、悬停稳定,为后续其他模式飞行奠定基础。
起飞检查¶
-
严格按照起飞检查清单逐一核查,确认各传感器工作正常、卫星定位是否正常;手动晃动飞机,验证地面站显示姿态与实际姿态一致;解锁后轻推油门打舵,观察电机转速变化符合控制逻辑。
-
手动模式下飞机无定位、无定高功能,具体控制逻辑参考《2.2 飞行模式》。
-
所有检查项目无异常后,确认已做好起飞准备。
巡航油门及机械安装调整¶
-
首次试飞时,因重心、电机安装平面、桨平面、飞控安装中位等因素,可能需持续压杆才能保持悬停:需手动操控维持飞机基本悬停状态,尽量保持高度稳定。
-
稳定悬停后,观察并记录此时的油门值、副翼舵、升降舵、航向舵和姿态的大致范围:
-
数据记录完成后,缓慢降低油门摇杆操作飞机降落,飞机接地后将油门拉至最低,确保飞机进入 “准备” 阶段。
-
悬停时的油门值
- 将空中记录的油门值,填写至“更多设置→飞行参数”界面“巡航油门”参数处。。

-
悬停时的横滚和俯仰舵值
- 若任一舵值绝对值>20,可能是电调校准不当或机体重心偏差,需重新校准电调或调整重心。
-
悬停时的航向舵
- 若航向舵值>±20,可能是电调校准不当或电机桨平面水平偏差,需重新校准电调或调整电机安装倾角,增强航向控制力。
-
注意:
-
调整电机安装倾角时,必须确认方向正确,错误的倾角可能导致航向逻辑异常或飞行失控。
-
禁止通过调整遥控器中位来补偿悬停所需的压杆操作,需通过以下步骤设置控制中位:
-
记录悬停时横滚角、俯仰角的大致范围,选取中间值;
-
通过 “参数配置-飞行参数-飞机性能” 界面,填入 “横滚中位” 和 “俯仰中位”;

-
无风环境下,悬停姿态的俯仰角、横滚角应控制在 ±3° 内;若超出该范围,需优先检查并调整安装中位。
-
飞机振动情况确认¶
-
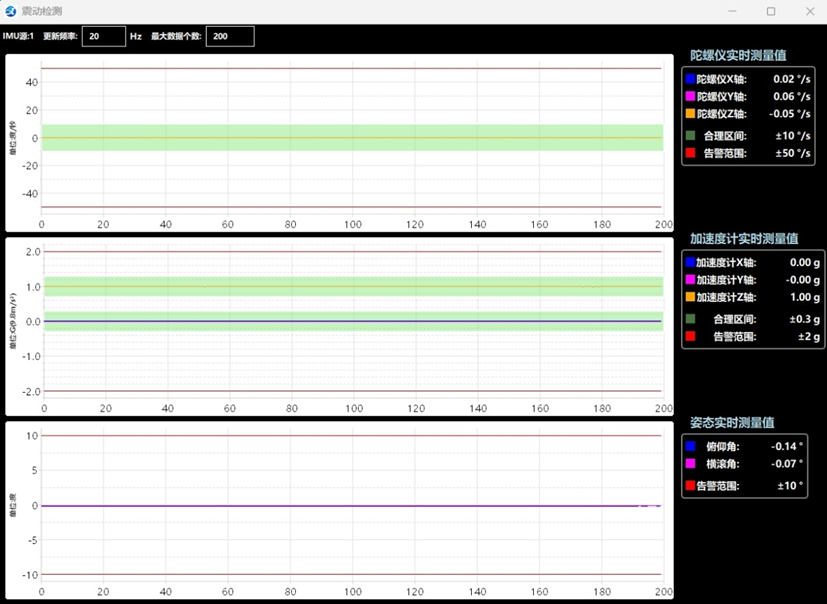
手动模式下起飞悬停,维持位置和高度稳定,通过 “更多设置” 打开振动检测界面,观察陀螺仪与加速度计的实时数据(需连接飞控才能显示):
-
振动合格标准:
-
动力未启动、飞机水平静止时:三轴陀螺仪接近 0°/s,X/Y 轴加速度计接近 0g,Z 轴加速度计接近 1g,姿态角接近 0°。
-
悬停状态下:陀螺仪、加速度计测量值需在界面底色范围内,超出则说明振动严重。
-
-
振动优化方案
-
若陀螺仪检测数据偏大,但加速度计测量值在合格范围:适当减少减震球个数(保持对称布置),或更换低硬度减震球,或者增加飞控重量,核心是减小飞控绕轴晃动幅度,避免陀螺受旋转振动干扰。
-
若陀螺仪数据正常,仅加速度计X、Y轴超出范围:增加减震球个数,或选用高硬度减震球,也可加大斜拉减震球硬度,重点抑制飞控沿水平轴平移,降低加速度计横向振动干扰;
-
若陀螺仪数据正常,仅加速度计Z轴超出范围:减少减震球个数,或更换低硬度减震球,优化飞控垂直方向缓冲效果,减小上下振动对Z轴加速度计的影响;
-
若加速度计与陀螺仪数据同时超标:优先排查安装环境,更换机身振动更小的安装位置;同步整理飞控线束,采用扎带固定并预留冗余长度,避免线束拉扯、挤压飞控,排除外部干扰后再优化减震结构。
-
注意:
- 以上为通用调整思路,若调整无效,请联系翔仪工程师协助。
调整控制参数¶
-
重新起飞悬停,验证 “巡航油门及机械安装” 调整效果,若未达预期,重复前述步骤循环优化。
-
详细参数优化及数据分析可参考《5.5 数据分析优化》。
-
感度调整(优化飞行手感):
-
操纵响应迟缓(飞机 “偏肉”):适当增大横滚、俯仰感度。
-
姿态响应过于灵敏且伴随晃动:适当减小横滚、俯仰感度。
-
调整原则:单次调整幅度 0.1~0.2,遵循 “修改感度→试飞验证→再修改” 的循环流程,直至状态达标。
-

注意:
测试应遵循“循序渐进”原则,先验证小杆量操作下的正常响应,再逐步开展大杆量飞行测试,避免因操作幅度过大导致失控风险。
最大飞行性能¶
-
最大姿态角:通过 “飞机性能” 界面设置 “最大俯仰角”“最大横滚角”,需结合实际飞行性能调整。
-
最大转动角速度:通过 “飞机性能” 界面的 “最大角速度” 参数设置(针对航向转动)。
-
最大上升速度由动力系统决定;最大下降速度建议不超过 3m/s,避免气流干扰导致飞机不稳定。

增稳模式调试¶
增稳模式具备位置锁定与速度控制功能,需在手动模式稳定的基础上调试,确保飞机位置、速度精准可靠。
调试前提条件¶
确认手动模式状态¶
-
手动模式下飞行稳定,姿态控制精准,悬停时油门杆处于中位(40%-60%),振动参数符合要求(陀螺仪数值≤±10°/s、加速度计数值≤±0.3g)。
-
若悬停时油门杆偏离中位较多,请重新调整 “巡航油门” 参数,确保切换增稳模式前飞机处于稳定悬停状态。
模式切换与初始测试¶
切换操作与风险控制¶
- 先通过手动模式操控飞机起飞,爬升至6-10米高度悬停,观察地面站数据确认振动状态良好后,再尝试拨动遥控器开关切换至增稳模式。
初始状态观察
- 切换后观察飞机是否保持当前位置与高度:若出现小幅高度变化(±0.5m 内),属飞控自动调整,无需干预;若高度波动>1m 或位置漂移严重,立即切回手动模式,检查 “巡航油门” 设置与振动情况。
注意:
-
如果是第一次切换到增稳模式飞行,飞机可能出现不稳定的情况,请做好立即切换到手动模式的准备,并立即降落检查问题。
-
如果飞机悬停状态稳定,可以进行后续试飞。若飞机不能稳定悬停,请参考《5.5 数据分析优化》优化参数。
飞行测试¶
水平运动测试¶
-
在增稳模式下,操控副翼、升降摇杆,控制飞机完成左右、前后飞行动作。遥控器杆量对应飞机目标速度,恒定杆量对应固定飞行速度。
-
需重点观察:飞机启动与停止动作是否平稳正常、恒定杆量下速度保持是否符合预设要求、运动过程中高度保持是否稳定。
-
参数调整:若飞机在启动与停止动作比较大,可在 “参数配置 - 飞机性能” 中减小 “横滚灵敏度”“俯仰灵敏度”(单次调整步长 0.5)。
垂直运动测试¶
-
在增稳模式下,推油门杆至固定位置(超过60%杆量),观察飞机上升速度是否恒定;将油门杆回中,高度锁定误差应≤±0.3m;拉低油门杆(低于40%杆量),验证飞机是否保持恒定速度下降。
-
参数调整:若高度不稳定(上下晃动),请检查振动是否超范围或在 “参数配置 - 飞机性能” 中调整“高度感度”(单次调整步长 0.1)。
注意:
测试应遵循“循序渐进”原则,先验证小杆量操作下的正常响应,再逐步开展大杆量飞行测试,避免因操作幅度过大导致失控风险。
常见问题排除¶
-
悬停时位置锁定不稳定
-
飞机无法稳定当前位置,出现持续漂移:检查遥控器中位是否准确,同时确认飞控遥控器参数中的中位设置是否正常。
-
飞机出现画圈现象,无法稳定悬停:起飞时确认飞机航向正确,检查磁罗盘是否受干扰,重新校准磁罗盘,确认填写的磁偏角是否正确。
-
-
打杆后姿态/速度不稳定
-
打杆后飞机动作剧烈,松杆后姿态波动明显:减小速度感度参数,同时检查横滚灵敏度、俯仰灵敏度是否过大。
-
恒定杆量下,飞机速度在目标值上下浮动,且姿态频繁变化:适当减小速度感度。
-
恒定杆量下,飞机速度始终达不到目标值,适当增大速度感度。
-
推杆前进、拉杆后退时,飞机无法沿直线运动,航向角无法锁定目标值,或前进时伴随侧向偏移:重点排查航向控制参数与磁偏角。
-
飞机低头/抬头时,实际航向变化但地面站显示航向与目标航向差值无变化:说明磁罗盘受到干扰,请排查并解决磁航向干扰问题。
-
飞机低头/抬头时,实际航向变化且地面站显示航向与目标航向差值增大:航向参数调整不当,适当加大航向感度。
-
-
高度不稳定
-
切换至增稳模式后,飞机高度先升降一段距离再稳定:检查悬停时油门杆是否在40%-60%区间,飞控可自动调整油门保持当前高度。
-
飞机高度上下晃动,无法稳定:立即切回手动模式手动保持高度,核查振动参数是否超出标准范围,优化减震措施。
-
飞机运动过程中高度无法保持锁定:检查飞控静压(高度传感器)是否被风直接吹拂,可加装海绵遮挡,避免气流干扰高度测量。
-
飞机升降速度不均、时快时慢:适当减小高度感度。
-
飞机升降速度无法达到目标值:适当增大高度感度。
-
注意:
- 调整感度时,建议单次调整步长为0.1。
自主模式调试¶
起飞前准备¶
-
参考手动模式起飞检查注意事项,完成整套系统航前检查。
-
自主飞行需要规划航线,航线规划可参考《3.2 航线规划》章节了解相关内容,以确保航线设置的准确性和安全性。
-
参数确认:
-
进入 “参数配置 - 飞行控制-飞行模式” 界面,设置 “起飞后动作”(如 “自动进入航线”)、“降落模式”(如 “自主降落”)、“返航高度”(建议不小于 15m,确保避开障碍物)。
-
确认 “应急参数”:定位故障 / 链路故障处理方式(如 “直线返航”“就地降落”),判断时间设为 5s,恢复时间设为 30s。
-
所有参数设置均以当前场地具备安全飞行条件为前提,确保设置后可在该场地安全开展飞行测试。
-
自主起飞调试¶
-
起飞方式选择与操作
-
全自主起飞(RC 主控):将遥控器模式开关拨至 “自主”,内八解锁,推油门超过 50%(起飞信号),飞机自动爬升至预定高度(如 5m)后进入航线;油门杆回至 50%,便于紧急切换增稳模式飞机悬停指令。
-
全自主起飞(地面站主控):双击地面站 “自主” 按钮,再双击 “起飞” 按钮,电机预旋后再次双击 “起飞”,飞机自动爬升并进入航线。
-
空中切换自主模式:飞机在增稳 / 手动模式下飞行时,切换至自主模式,飞机自动爬升至预定高度后执行航线(需确保航线已上传)。
-
-
起飞参数调整
-
若爬升速度过慢 / 过快,进入 “参数配置 -飞行控制- 飞机性能” 调整 “上升速度”(默认 2m/s,每次 ±0.2m/s)。

-
若起飞后偏离航线,检查航点坐标是否正确,卫星定位精度是否≤1m,重新上传航线后重试。
-
自主巡航与降落调试¶
-
巡航状态监控
-
观察地面站 “飞行数据”:飞机是否按航点顺序飞行,目标航点与实际位置偏差≤±2m,航向锁定正确(无大幅漂移)。
-
观察实际飞机:在可视范围内时,飞行姿态是否稳定。
-
实时监测传感器状态:卫星数量≥15 颗,电压、转速等参数正常,无定位 / 链路异常提示;若出现异常,立即切换至增稳/手动模式,遥控器操作飞机返航。
-
-
自主降落调试
-
降落流程:飞机到达降落点后,机头对准起飞航向,先以 -1.5m/s 快速下降至 8m 高度,再以 0.5m/s(接地速度)缓降落地,自动停车。
-
手动干预:降落过程中可通过遥控器调整飞机位置 / 航向,干预后飞机暂时降低下降速度,待位置锁定后恢复正常;大风天气建议在 8m 高度切换至增稳模式手动降落,避免飞机由于地面倾斜或油门没有立即降低导致侧翻。
-
-
异常处理
-
降落点偏差大:检查降落点坐标设置,确认卫星定位无漂移,重新校准 GNSS。
-
下降速度异常:若快速下降阶段速度超 1.5m/s,检查 “下降速度” 参数;缓降阶段速度超 0.5m/s,调整 “接地速度” 参数(默认 0.5m/s,不建议>0.8m/s)。
-
注意:
- 如果飞行阶段出现任何异常,请及时切换到增稳或者手动模式(超出视距时不建议切换到手动模式),及时返航并检查问题。如果飞机触发应急操作,请按照相应流程操作,最大限度地保障飞机安全及飞行任务的顺利完成。
异常排查与优化¶
-
飞机在飞行过程中提示异常,对应异常栏提示进行排查。
-
飞机在飞行过程中姿态不稳、侧偏较大等情况,参考《5.5 数据分析优化》进行分析优化。
数据分析优化¶
地面站软件提供实时分析和离线分析两种核心模式,配套数据导出、数据回放功能,满足飞行中实时调参与飞行后复盘优化需求。
实时数据分析(飞行中)
-
可以在飞行中实时观察测量值与目标值的曲线贴合度,直观判断参数适配性,便于现场快速调整参数。
-
使用说明参考《6.4 数据分析》章节。
离线分析(飞行后复盘优化)
-
可通过缩放、平移、分段查看等功能,定位特定飞行阶段(如起飞、悬停、航线飞行)的数据异常,追溯不稳定现象的根源(如振动超标、参数不合适等)。
-
使用说明参考《6.4 数据分析》章节。
数据回放
-
可直接在地面站软件界面观察,方便定位异常发生的时间节点(如姿态突变、转速波动等),结合当时的操作指令(如遥控器打杆、地面站指令等),分析人为操作或参数设置导致的问题。
-
使用说明参考《5.7.7 数据回放》章节。
数据导出
-
可以在地面站软件上将存储的原始飞行日志导出为“CSV”格式,可灵活方便使用其他软件进行数据分析和曲线绘制。
-
使用说明参考《5.7.8 数据导出》章节。
-
PID参数调整界面(默认参数),参数含义可参考《6.3.1 飞行控制》

注意:
- 控制精度取决于测量精度、控制参数、动力响应、机体设计及振动等多方面,若反复调整参数并无明显优化,需要考虑机械、动力等影响。
手动模式¶
-
目视观察
-
飞机起飞离地时向一侧倾斜。
-
一般为机械安装导致,优先从机械安装上调整。
-
调整“飞机性能”中横滚、俯仰中位,±3以内,若超过建议优先调整机械。
-
-
离地后飞机位置不稳定,需要频繁修正且高度不稳。
-
手动模式不定高不定位,位置、高度波动属于正常情况,需要及时手动修正。
-
若在几乎无风时持续一个方向飘,可通过“飞机性能”中横滚、俯仰中位进行微调,若调整幅度过大,且观察悬停飞行时某个舵量过大,需要优先从机械上调整。
-
-
飞机悬停、机动时大幅度低频晃动。
- 可能为角速率环参数较小,建议结合曲线进一步分析。
-
飞机悬停、机动时小幅度高频抖动。
- 可能为角速率环参数过大,建议结合曲线进一步分析。
-
打杆后飞机响应太快或太慢。
- 可能为角度环参数不合适,建议结合曲线进一步分析。
-
飞机航向无法锁定或高频摆动。
- 可能为航向速率参数不合适,建议结合曲线进一步分析。
-
-
曲线分析
-
俯仰、横滚不打杆目标姿态不变时,实际横滚/俯仰曲线在目标附近慢震荡,对应舵量变化较慢,且飞机实际低频晃动。
-
优先加大横滚/俯仰速率P,步长0.05。
-
若速率环调整无明显优化,可尝试加大横滚/俯仰角度环KS参数,步长0.03。
-
-
俯仰、横滚不打杆目标姿态不变时,实际横滚/俯仰曲线在目标附近高频波动,对应舵量变化较快。
-
减小横滚/俯仰速率P,步长0.05。
-
可能为振动导致,分析陀螺X、Y轴曲线,±10以内正常。
-
-
俯仰、横滚打杆时目标姿态变化,实际姿态到目标姿态延迟较大且到目标附近慢震荡。
-
优先加大横滚/俯仰速率P,步长0.05。
-
若速率环调整无明显优化,可尝试加大横滚/俯仰角度环KS参数,步长0.03。
-
-
俯仰、横滚打杆时目标姿态变化,实际姿态到目标姿态跟随过快且到目标附近快震荡。
-
减小横滚/俯仰速率P,步长0.05。
-
可能为振动导致,分析陀螺X、Y轴曲线,±10以内正常。
-
-
俯仰、横滚打杆目标姿态变化时,实际姿态变化到目标附近时持续存在固定误差。
- 增大横滚/俯仰参数I,步长0.05。
-
航向不打杆,航向角在目标航向附近大幅度慢晃动或高频震荡。
-
大幅度晃动,航向锁不住增大航向速率P参数,高频震荡减小航向速率P参数。步长0.05
-
可能为振动导致,分析陀螺Z轴曲线,±10以内正常。
-
-
注意:
-
以上参数调整方法均为常规情况下,某些特殊情况不一定适用,若调整过程中出现异常请联系翔仪工程师协助。
-
调整步长适用于大部分飞机,若调整出现异常,建议联系翔仪工程师协助。
-
调整参数总幅度不超过20%,若调整幅度过大且反复调整无法优化飞行状态,建议联系翔仪工程师协助。(若原参数为1,则调整总幅度为±0.2)。
-
姿态曲线跟随一般误差1°以内,延迟0.5s以内,此标准适用于大部分类型飞机,但不适用于所有飞机,需要结合实际情况分析。
增稳模式¶
-
目视观察
-
飞机起飞离地时向一侧倾斜。
-
一般为机械安装导致,优先从机械安装上调整。
-
调整“飞机性能”中横滚、俯仰中位,±3以内,若超过建议优先调整机械。
-
建议起飞离地时油门杆过中位快一些,增稳模式定高,若长时间停留在中位附近飞控判断锁定当前高度,可以就会出现在地面倾斜等情况。
-
-
飞机离地后俯仰、横滚不打杆悬停且油门杆中位,位置锁定较差或高度不稳定。
-
观察定位状态是否正常,若定位精度较差(水平1以内,垂直1.5以内为正常),先调整定位状态使定位状态正常。
-
外界存在较大扰动,比如阵风过大。
-
控制参数不合适,建议结合曲线进一步分析。
-
-
俯仰、横滚打杆后飞机姿态较小且加速较慢,杆位回中后刹停较慢。
- 可能为速度环参数较小,建议结合曲线进一步分析。
-
俯仰、横滚打杆后飞机姿态过大且加速过快,回中后刹停姿态过大。
- 可能为速度环参数过小,建议结合曲线进一步分析。
-
改变油门杆不处于中位上升或下降时,速度变化过大或较小。
- 可能为速度环参数不合适,建议结合曲线进一步分析。
-
-
曲线分析
-
按照手动模式曲线分析方法进行姿态控制分析。
- 若姿态曲线跟随较差,优先手动模式飞行测试优化姿态曲线跟随。
-
持续打杆目标速度固定时,速度曲线跟随较差。
-
实际前向/侧向速度曲线跟随目标曲线较姿态跟随延迟会更大。
-
同步观察姿态跟随。若姿态跟随正常,加速慢,可加大对应速度环P参数;加速快,减小对应速度环P参数,调整步长均为0.1。若姿态跟随较差,优先优化姿态跟随。
-
-
推拉油门杆有目标天向速度曲线变化后,实际天向速度曲线加减过快或较慢。
- 对应调整垂直速度P参数,若加速快减小参数,加速慢增大参数,步长0.1。
-
高度波动时,绘制“目标高度”、“GNSS海拔”、“气压高度”、“组合相对高度”、“目标天向速度”、“天向速度”等数据。
-
对比实际飞行天向速度变化和数据天向速度,确认是否测量错误,若测量错误,可能导致高度波动。(一般由振动导致,参考《5.2 手动模式调试》中确认振动情况,若振动较大先手动模式飞行调整振动)
-
天向速度测量正常情况下,对比实际高度变化和数据中高度变化,确认高度是否测量错误,若错误,对比实际高度变化时数据中“GNSS海拔”、“气压高度”变化,确认是否为“GNSS海拔”、“气压高度”测量异常导致高度波动。
-
-
自主模式¶
-
目视观察
-
观察飞机悬停、上升、下降、航线飞行时是否稳定。
-
排查是否存在外界不稳定扰动。
-
建议结合曲线进一步分析。
-
-
地面站观察飞机航线压线是否正常。
-
分析航线设置是否合理。
-
建议结合曲线进一步分析。
-
-
-
曲线分析
-
按照手动模式曲线分析方法进行分析姿态控制。
- 若姿态曲线跟随较差,优先手动模式飞行测试优化姿态曲线跟随。
-
存在较大航线侧偏。
- 若姿态、速度控制正常,位置有误差后收敛较慢,可适当增加对应位置环P参数;航线飞行时“S”型轨迹,可适当减小对应位置环P参数,步长0.1。
-
注意:
-
优先确认姿态跟随是否正常,最终再逐步确认速度、位置控制状态。多旋翼的控制回路是由内到外分别是“角速率-姿态-速度-位置”,在优化外环控制时,需要先确保内环正常。由于角速率我们无法对数据曲线进行分析优化,故通过分析姿态跟随曲线来先调整角速率环参数,再逐步去优化外环。
-
所有参数调整均遵循“试飞-降落-分析-调参-试飞”流程。