地面调试¶
概述¶
本章是无人机地面调试的主要内容,涵盖从建立通信到地面调试完成的全过程,本章节介绍了建立通信、参数检查确认、遥控器检查、舵机调整、油门调整、逻辑确认五个关键环节。
建立通信¶
调试版地面站与通用版地面站支持单独连接与同时连接两种使用模式,但在地面调试阶段需要同时连接通用版地面站和调试版地面站,方便进行数据观察。
通用版地面站通信连接参考《5.1 通信配置》章节描述。
调试版地面站连接¶
当需同时使用通用版地面站和调试版地面站时,需启用数据共享功能,具体操作步骤如下:
- 打开通用版地面站,在正常连接的基础上,打开共享界面,填入对应的 “IP地址、端口号”,并开启共享;
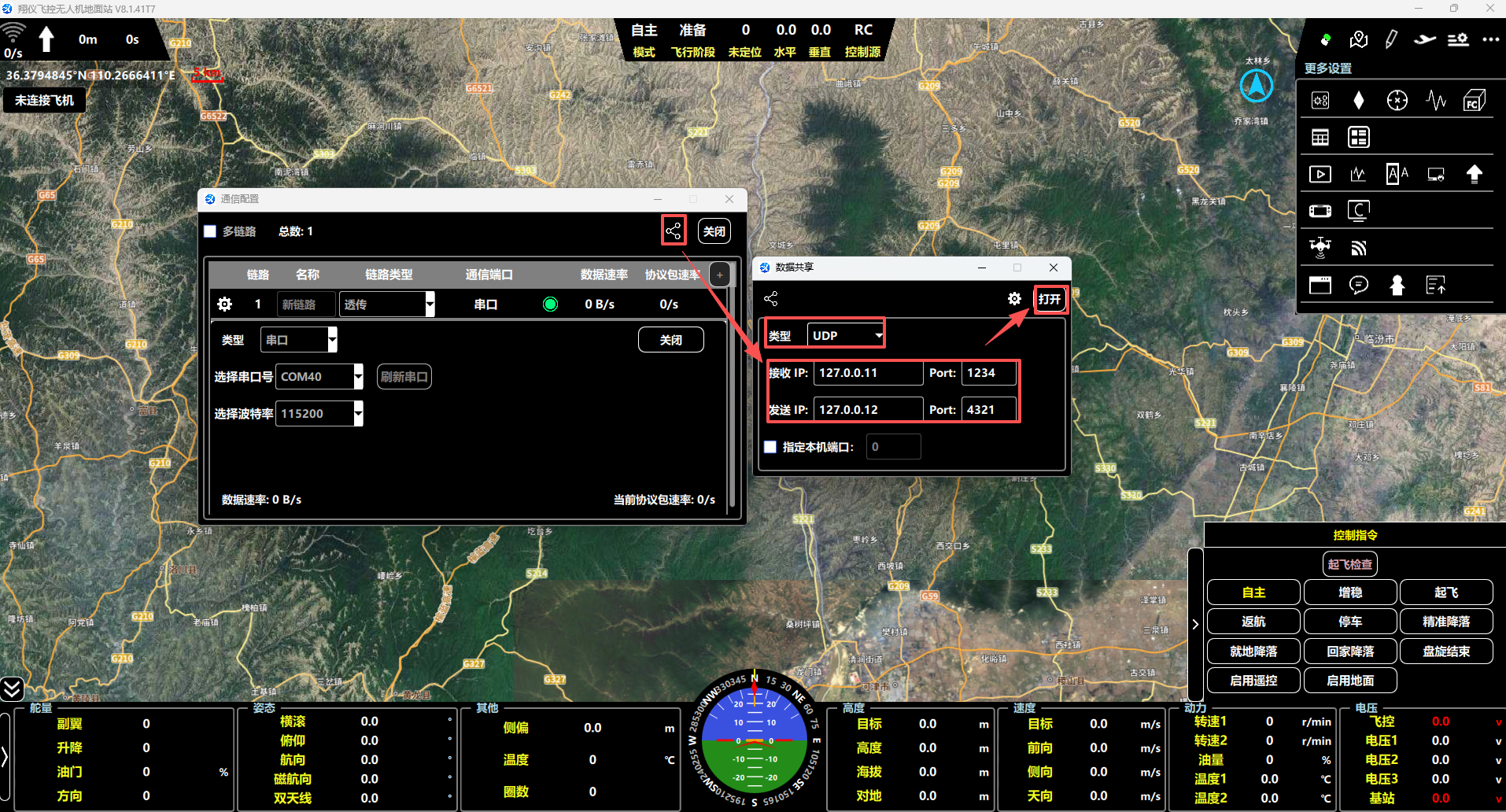
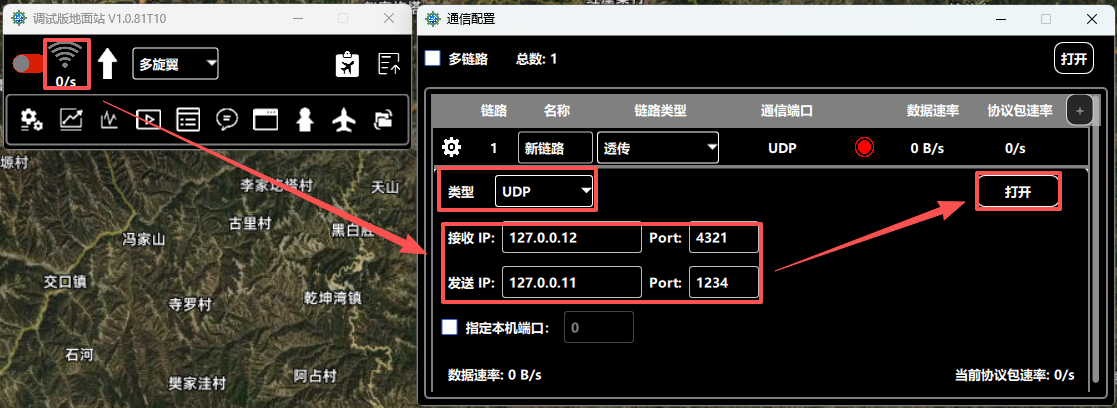
- 打开调试版地面站,点击左上角 wifi 图标,弹出通信口配置界面,端口类型选择“UDP”,填入对应的 “IP地址、端口号” ,并 “打开” ,即可实现与通用版地面站的数据共享。
如需单独连接调试版地面站软件,请参考本手册《6.1 通信连接》章节描述。
参数检查确认¶
在直升机无人机地面调试阶段,参数检查确认是保障后续飞行安全与稳定性的必要环节,需围绕硬件配置、飞行控制逻辑、应急保障四大维度,逐一核对参数与实际机型、任务需求的匹配性,具体内容如下:
安装参数检查¶
安装参数直接关联飞控与机体的物理适配性,需结合飞机实际安装位置、硬件布局逐一校准,是地面调试的关键环节:
-
安装方向与中位校准
-
飞控安装指向:在“参数配置-安装参数-安装位置”中,Y轴、Z轴设置需与实际飞机一致,调整后需验证:飞机低头时地面站“俯仰角”显示负值,抬头为正值;左滚时“横滚角”为负值,右滚为正值,确保姿态反馈与实际动作一致。
-
安装中位修正:飞机平稳放置于水平地面(机体完全水平),调整“横滚中位”“俯仰中位”参数,使地面站姿态显示误差控制在±2°以内;若机械安装倾斜过大(如机架变形),需优先修正机械结构,而非依赖参数补偿(避免减弱减震效果)。
-
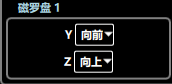
磁罗盘:在“参数配置-安装参数-多余度”中,磁罗盘安装需与机体正交水平,Y轴、Z轴设置需与实际飞机一致,调整后需验证:飞机左转时“磁航向”减小,右转时增大; 磁偏角默认设为0,后续通过实地测试补充精确值。
-
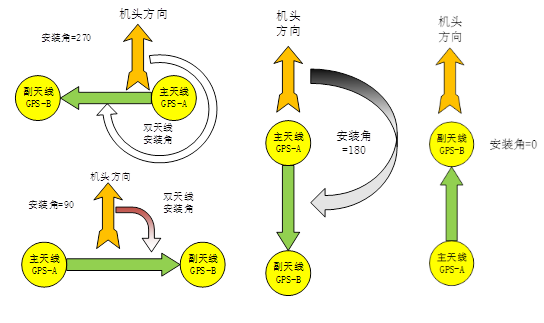
双天线:若配备双天线,“双天线安装角”需按实际测量值填写,主天线位置需作为GPS坐标修正的基准。
-
-
坐标修正
-
IMU坐标:以机体中心为原点,X轴左侧为正、右侧为负;Y轴后方为正、前方为负;若飞控偏离机体中心≤50cm,可填0(无需修正),超出则按实际距离填写(单位:mm)。
-
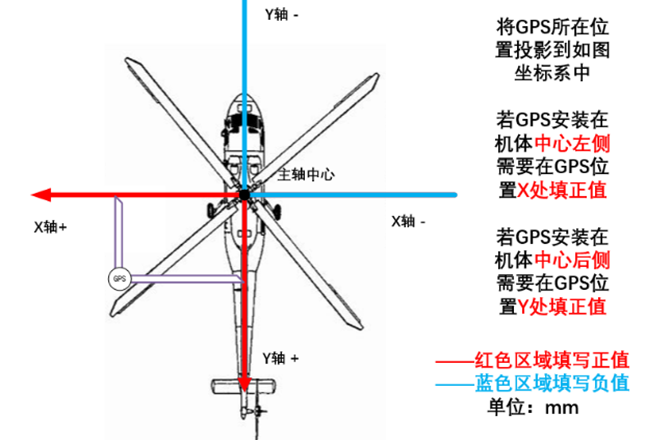
卫导(GPS)坐标:X轴左侧为正、右侧为负;Y轴后方为正、前方为负;Z轴上方为正、下方为负;双天线系统需确保主/备天线位置相近,共用同一补偿参数,避免切换时姿态波动。

-
-
输出配置
-
矩阵:在“矩阵配置”中,各矩阵(fz/mx/my/mz)参数需与机型舵机布局匹配(如3舵机、4舵机),请联系翔仪技术人员确认。
-
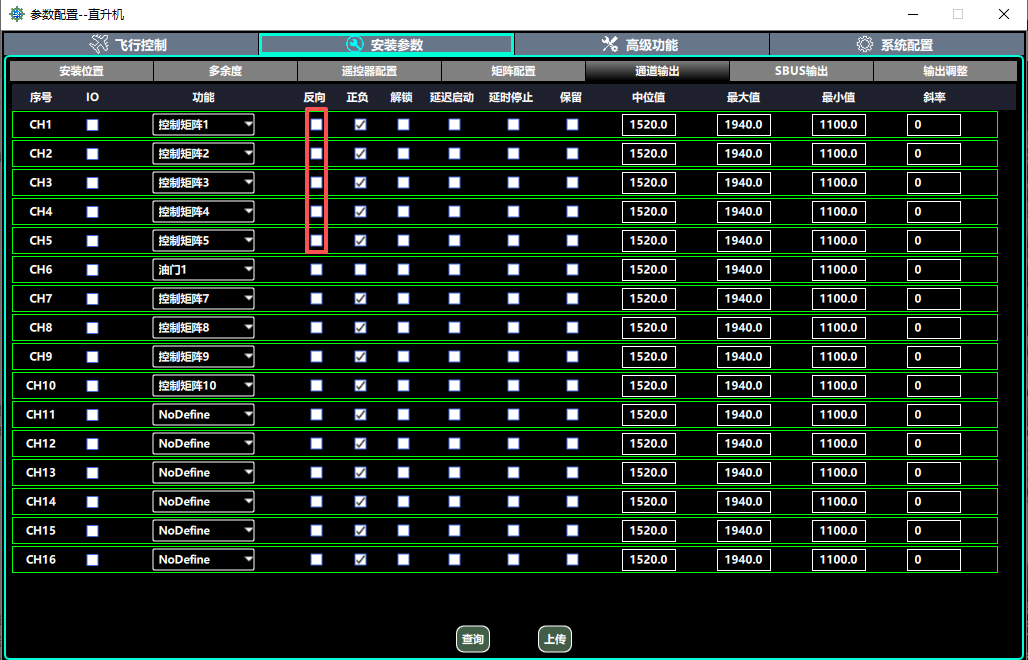
通道输出:在“通道输出”“SBUS输出”中,通道功能(如CH1-6对应控制矩阵1-6)需与实际接线一致,舵机默认勾选“正负”,错误会导致飞行不可控,飞控默认输出脉宽为1100~1940,其他特殊需求请联系翔仪技术人员。
-
详细参数说明参考《7.3.2 安装参数》章节。
飞行参数检查¶
飞行参数决定飞机的飞行性能与控制逻辑,需结合机型动力、任务场景(如悬停、巡航)调整,具体包括:
-
基础控制参数
- 控制参数:在“参数配置-飞行控制-控制参数”中,保持默认,请联系翔仪技术人员确认。
-
飞机性能参数
-
飞行极限:在“参数配置-飞行控制-飞机性能”中,“飞行极限”栏参数需按实际需求设置,避免超出机型物理极限。
-
其他参数:“保护总距”(飞行时最小总距限制,默认10%)、“巡航总距”(悬停时参考总距,需通过试飞实测后填写,如50%);“横滚/俯仰灵敏度”(增稳模式加减速快慢,默认5.00m/s²)、“加减速”(自主模式加减速,默认1.00m/s²)需按操控手感调整。
-
-
油门参数与飞行模式
-
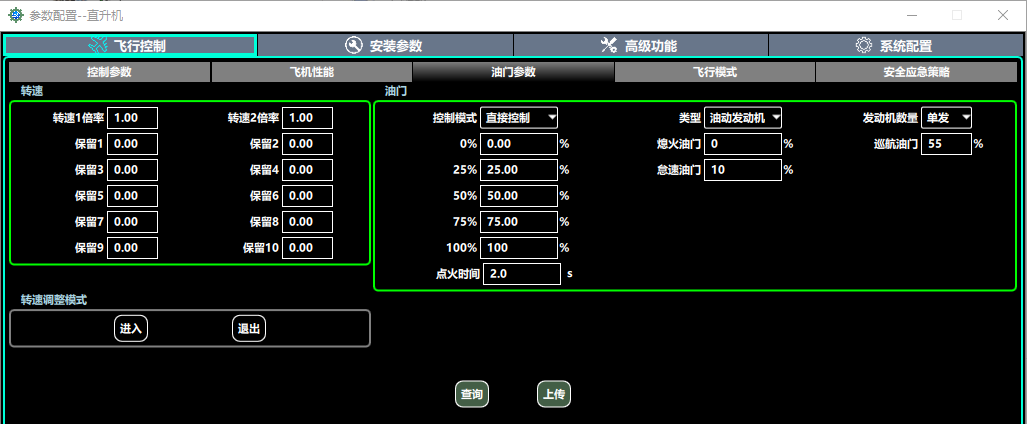
油门参数:在“油门参数”界面中,根据实际控制模式、发动机类型填写。
-
飞行模式:“飞行模式”界面中,“飞行参数”保持默认。“其他参数”保持默认勾选项,需了解详细控制逻辑后勾选。
-
-
应急参数
-
故障处理逻辑:“安全应急策略”界面中,“定位故障”“链路故障”的“处理方式”(如“就地降落”“直线返航”)、“判断时间”(如5s,持续故障判定时长)、“恢复时间”(如1s,故障恢复判定时长)、“干预时间”(如30s,超时执行应急操作)需按飞行环境设置(如偏远地区优先“返航”,复杂地形优先“就地降落”)。
-
其他参数:根据实际情况填写。
-
详细参数说明参考《7.3.1 飞行控制》章节。
遥控器检查¶
遥控器数据检查¶
联通性检查¶
开启遥控器时,请留意接收机的状态,确保其指示灯闪烁正常。同时,检查地面站软件左侧区域,确认无“遥控器”的异常提示信息。
摇杆值检查¶
请按照以下步骤检查摇杆的正反向、中立位和行程是否符合要求:
-
副翼摇杆:最左为-100,中立为0,最右为100。
-
升降摇杆:前推为-100,中立为0,拉杆为100。
-
油门摇杆:最低为-100,中间为0,最高为100。
-
方向摇杆:最左为-100,中立为0,最右为100。
-
其他三挡开关:检查对应通道值是否在-100(1100)、0(1520)和100(1940)之间正常变化。

模式切换开关检查¶
拨动模式切换开关(通道6),观察飞行模式是否能够正常进行切换,以此确保遥控器对飞行模式的控制功能正常。
| 通道号 | RC值 | 对应飞行模式 |
|---|---|---|
| RC 6 | -100 | 手动模式 |
| RC 6 | 0 | 增稳模式 |
| RC 6 | 100 | 自主模式 |
定速开关检查¶
拨动定速切换开关(通道7),观察地面站RC栏7通道数据变化是否正常。
遥控器参数调整¶
反向调整¶
某个摇杆的方向和上述描述不符,遥控器通道反向菜单(REVERSE菜单)将对应通道反向。
行程与中立值校准¶
若某个摇杆的行程范围并非在1100 - 1940之间,或者中立值不是1520,请利用遥控器自带的校准功能对摇杆进行校准。
若遥控器不具备自校准功能,则可通过调整遥控器的行程极限(通常在END POINT菜单中操作)来满足行程要求,通过调整通道微调(一般在SUB TRIM菜单中操作)来满足中立位要求。
特殊调整¶
建议使用 Futaba 品牌 T8 及以后系列的 遥控器产品,市场使用广泛。
若遥控器特殊,修改遥控器本身设置无法满足飞控要求,可以调整飞控的“遥控器参数”适配遥控器,支持通道正反向、中立位及行程范围调整。
“遥控器参数”是针对特定遥控器进行设置的。如果更换了遥控器,原有的参数可能不适用于新设备。因此,不建议通过修改飞控的“遥控器参数”来解决兼容性问题。
舵机调整¶
调试前准备¶
-
明确舵机的控制接口类型,如PWM、CAN、RS422等。
-
若为 PWM 控制舵机,需提前明确舵机的控制频率、控制脉宽等参数。
-
若为 CAN/RS422 等其他接口,需提前明确舵机的控制 ID、控制频率、波特率等参数。
-
舵机调试¶
此处仅以PWM控制接口示例:
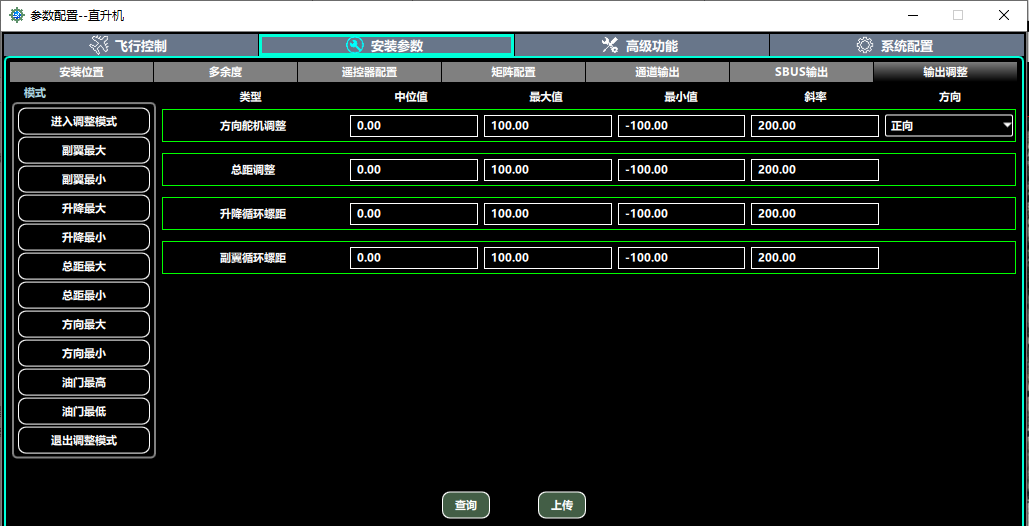
拆除舵机摇臂或连杆,将遥控器正常连接且将油门摇杆置于最低位,仅给飞控系统上电,打开地面站,在“参数配置-安装参数-输出调整”界面,点击左上角“进入调整模式”。
总距舵机调试¶
-
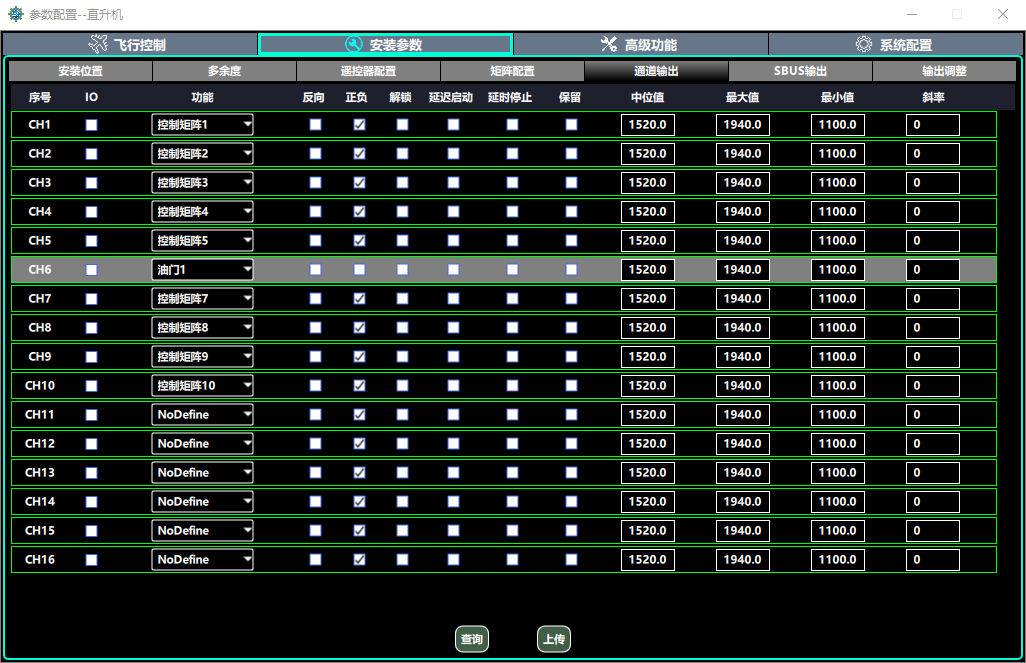
将遥控器油门摇杆推至中位,为舵机系统上电,通过遥控器小幅度操控各舵机,仔细观察整机所有舵机的动作方向,确保与预期方向一致。如果发现某个舵机的动作方向与正常情况相反,则需在“通道输出”界面勾选/取消对应通道反向,完成参数上传后重新验证,直至舵机动作方向正确。
-
确认所有舵机方向正确后,在总距处于中位的状态下,安装舵机摇臂或连杆,保证总距角度基本处于中位区间。
-
摇臂或连杆安装完成后,调整各舵机对应通道输出“中位值”,使十字盘与机身基准面保持平齐(如有特殊飞行需求,则需确保十字盘符合实际要求)。
提示:
-
调整应遵循少量多次,单次调整步长不建议大于20。
-
中位值调整完成后,需对应同步增减该通道输出的最大值与最小值参数。
-
分别将总距推至最大、最小位置,对应修改各通道输出的最大值或最小值参数,使十字盘在整个行程范围内均保持水平状态。
-
确认同一旋翼头的所有桨夹角度一致,测量与调整要求如下:
-
使用测角仪,在旋翼头任意固定位置,先测量其中一个桨夹的角度;转动旋翼头其他桨夹至同一基准位置,依次测量其余桨夹的角度,同一旋翼头下所有桨夹的角度误差需≤0.2°,若超出误差范围需进行机械结构调整。
-
若无人机有多个旋翼头,所有旋翼头均需按上述方法逐一测量与校准。
-
-
分别将总距推至最大、最小、中位位置,对应修改“输出调整”界面中总距调整的最大值、最小值、中位值参数,完成总距标定。
注意:
-
总距标定前,请将角度尺在机体上合适位置清零。
-
输出调整界面中总距调整最大值和最小值不可设置为同向。
-
将总距保持在中位状态,对副翼、俯仰、航向的循环螺距进行标定,在“输出调整”界面中对应修改各通道的最大值、最小值、中位值参数。
提示:
- 单次角度测量完成后,建议将总距拉至低位后再重新推至中位,重复测量以减少测量误差或机械虚位导致的标定偏差。
单旋翼行程参考:总距行程一般为 - 1°~12°,俯仰、横滚循环螺距行程一般为 ±6°,尾桨角度一般为-20~30°,具体参数需结合飞机构型、机械设计要求确定。
纵列行程参考:总距行程一般为 - 1°~12°,俯仰总距差一般为 ±3.5°,横滚循环螺距行程一般为 ±8,方向循环螺距行程一般为 ±4,具体参数需结合飞机构型、机械设计要求确定。
共轴行程参考:总距行程一般为 - 1°~12°,俯仰、横滚循环螺距行程一般为 ±6,方向总距差一般为 ±3,具体参数需结合飞机构型、机械设计要求确定。
方向舵机调试¶
-
遥控器打杆,检查方向舵机的极性是否正确。如果需要反向,则在对应舵机通道后勾选“反向”参数,将其反向。
-
将遥控器的方向舵摇杆分别打到两侧最大时,分别调整最大值和最小值,使方向舵机刚好达到所需的左右极限螺距。调整前,请先确认遥控器方向摇杆打到一边时,对应“输出调整-方向舵机调整”的“最大值”还是“最小值”。
注意:
-
为保证尾桨不会失速,请根据尾桨的角度来调整最大和最小值,而不是根据机械的最大行程来调整。
-
将遥控器的方向摇杆放至中位,调整方向舵机中位,让尾桨的螺距接近悬停时的螺距为最佳。
所有姿态控制舵机标定完成后,在“参数配置-安装参数-输出调整”界面,点击左下角“退出调整模式”。
油门调整¶
控制方式与类型选择¶
-
控制方式选择
-
直接控制:适用于电动飞机无需定速场景,油门输出由油门曲线决定,需手动调整曲线使主桨转速近似恒定(实际较少使用)。
-
ECU 控制:适用于电调或ECU自带定速功能,飞控输出定速信号(可能是PWM或其他串口、CAN口),由电调或ECU完成定速。
-
转速控制:适用于油动飞机或需飞控定速的电动飞机,飞控通过控制油门大小维持转速恒定(推荐油动直升机使用)。
-
-
油门类型选择
-
电动发动机:需内八解锁才能控制油门通道输出,适用于电动动力且需锁定油门的场景。
-
油动发动机:无需内八解锁即可控制油门舵机 / 电调,适用于油动动力或无需锁定油门的场景(按实际锁定需求选择,非按发动机类型)。
-
电动调整(电动飞机专属)¶
-
电调校准
-
飞控上电,电调不上电,确认地面站显示为手动模式。
-
打开电调校准界面,点击 “开始校准”,将遥控器油门杆推至最高(RC3 显示 100),给电调通电,待电调发出两声 “滴滴” 后,立即将油门杆拉至最低,电机发出一声长音 “滴~” 表示校准完成(以电调说明书为准)。
-
-
电机转向检查:校准后缓慢推油门杆,观察电机转向是否正确;若反向,断开动力电源,互换电调与电机三相线中任意两根,重新测试。
-
注意事项:若电调无需校准,可跳过校准步骤;所有操作需在遥控模式下进行,避免校准失败。
提示:
更多操作详情参考《5.7.3 电调校准》章节描述。
油门舵机调试(油动飞机专属)¶
此调试仅针对油动发动机且飞控控制油门舵机的场景。
打开地面站,在“参数配置-飞行参数-油门参数”界面,控制方式修改为“直接控制”,类型为“油动发动机”。
此处仅以PWM控制接口示例:
-
遥控器正常连接且将油门摇杆置于最低位,轻推油门摇杆进行小幅操作,观察油门舵机的动作方向是否符合控制预期。
-
若油门舵机动作方向错误,在“参数配置-安装参数-通道输出”界面,勾选/取消对应通道反向选项,完成参数上传后重新执行步骤 1 验证,直至舵机动作方向正确。
-
若油门舵机的行程范围不符合设计要求,在上述界面修改对应油门通道的输出最大值与最小值参数即可。
逻辑确认¶
控制逻辑验证¶
本测试为无人机地面调试最终环节,用于校验舵机接线顺序、飞控配置参数的正确性,验证整机控制逻辑的合理性,为后续安全起飞提供基础保障。测试前必须断开动力电/开关。
-
将无人机放置于水平地面,舵机系统上电;
-
将遥控器切换至手动模式,操作遥控器各通道打杆,观察各舵机的响应逻辑是否正常、动作是否连贯;
-
分别将总距调节至最大、最小位置,操作遥控器打组合杆测试,验证极端工况下舵机及机械结构是否存在卡滞现象;
注意:
若在最大或最小总距工况下打杆出现机械卡滞问题,请参考《3.4 舵机调整》章节重新调整,或从机械结构层面优化解决该问题。
- 切换遥控器至增稳模式,分别移动飞控执行俯仰、横滚、航向姿态动作,观察舵机输出的修正量是否为对应姿态的纠正修正量,确保修正逻辑正确。