飞行操作流程¶
概述¶
本章是无人机飞行任务执行的核心指南,涵盖从任务准备到全流程飞行的完整过程,严格遵循标准化流程是确保飞行安全和任务成功的关键;本章节介绍了建立通信、航线规划、起飞前检查、手动模式飞行、增稳模式飞行和自主模式飞行六个核心环节。
需要特别注意的是,所有飞行操作必须严格遵守当地法律法规和飞行管制要求,飞行前必须完成所有检查项目,不得简化或跳过,需要根据任务复杂度和环境条件选择合适的飞行模式,操作人员在飞行过程中需密切关注无人机状态。
建立通信¶
-
打开软件左上角 wifi 图标,弹出通信配置界面(默认端口类型为串口);
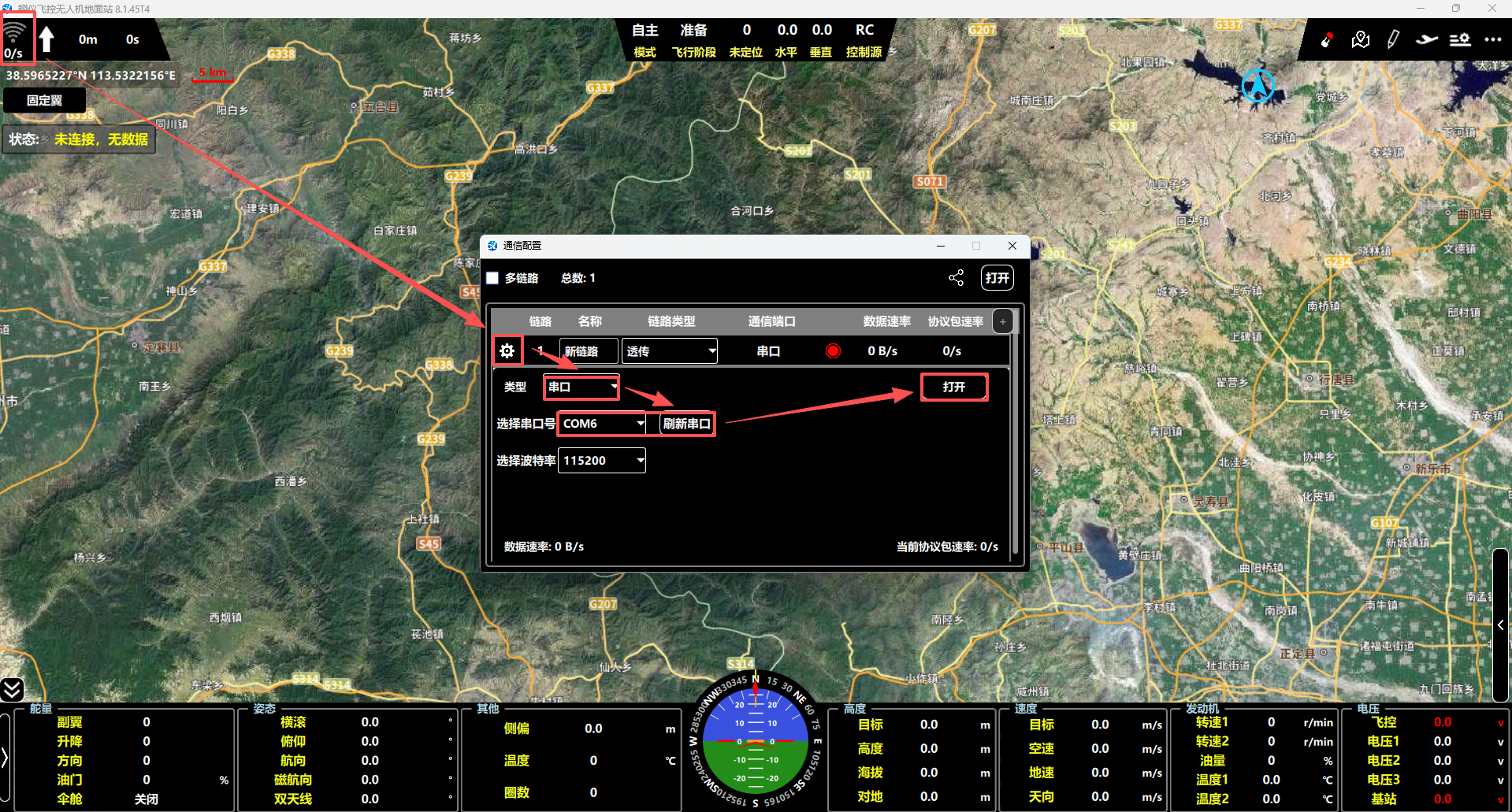
-
在通信口配置界面中,根据实际情况选择串口或UDP通信,选择正确的串口或填写正确的IP和端口,设置完成后点击 打开 按钮,即可尝试建立与飞控的通信连接;
-
飞控系统上电,等待数据接入。
更多详细设置参《5.1 通信配置》章节
注意 :
-
若地面站软件无法识别到串口号
-
检查串口线是否正确连接到电脑上;
-
若已连接串口线但仍无串口号显示,需到电脑 “设备管理器” 中检查串口线驱动是否成功安装。
-
-
UDP无法正常连接
-
确保该端口未被其他程序占用;
-
若连接失败,检查网络参数是否正确;
-
防火墙是否阻止了UDP通信问题;
-
本地网络是否能 ping 通 IP 地址。
-
航线规划¶
- 在地面站软件上根据任务要求及场地进行合理的航线规划。
- 规划好之后点击 航点上传 按钮,弹出航线上传界面。
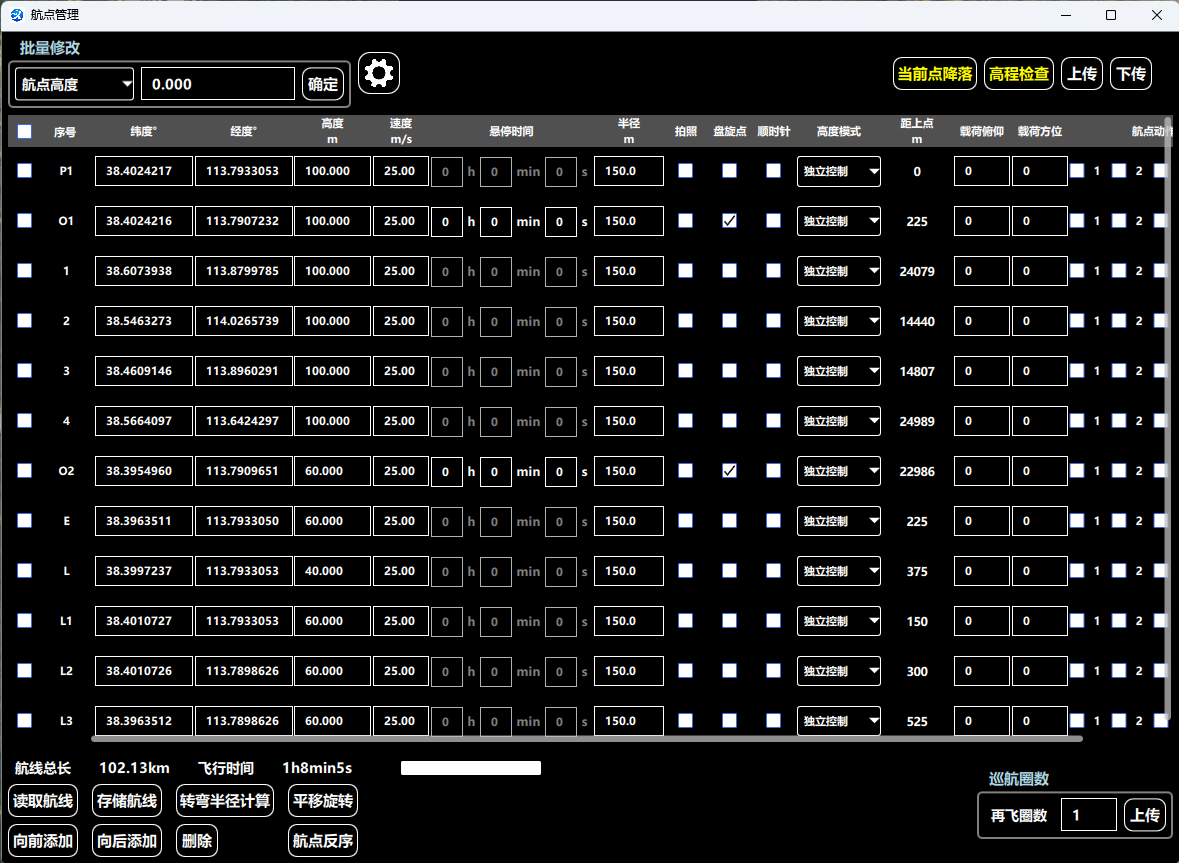
- 确认以上航点属性都无误,点击“上传”按钮,给飞控上传航线。

-
航点上传完成后,点击“ 确认 ” ,地面站软件自动将上传后的航线下载下来并在地图上显示。
-
也可以导入已经规划好的航线文件,点击“读取航线”/“导入” 按钮,弹出界面检查框:


- 点击“打开文件” ,选择要飞行的航线文件;

-
输入正确的海拔,确认后,点击 “导入” 即可。确认航点属性都无误,点击“上传”按钮,给飞控上传航线。
-
航点上传完成后,地面站软件会自动将上传后的航线下载并在地图上显示。
详情可参《5.4 航点规划菜单》章节
注意 :
飞控断电后,当前航线信息不会被保存,重新上电时,需要重新上传航线。
起飞前检查¶
当飞机准备就绪,准备起飞时,请按照地面站软件标准起飞检查流程,执行起飞检查步骤。
-
详情参《起飞检查》章节相关描述。
-
按照界面提示完成飞控检查后,需要再对飞机进行详细检查,包含但不仅限于以下内容:
-
舵机、连杆、舵面无松动,遥控器打杆检查时,作动流畅无异响;
-
桨叶:桨叶无破损、变形、裂纹、无晃动;
-
其他外设均需检查牢靠连接。
-
-
场地要求:
-
起降场地:平整、无碎石 / 积水,跑道内无人员、建筑、树木等障碍物;远离高压线、变电站、机场等强电磁干扰或禁飞区域;
- 滑起滑降飞机需要确保跑道满足起降、滑跑条件;
-
净空条件:飞行空域无低云、大雾(能见度≥1km),无鸟类或其他飞行器活动;
-
人员安全:起飞前确认所有人员远离飞机(≥10m),无关人员禁止进入跑道;操作人员穿戴防护装备、反光背心等。
-
手动模式飞行¶
-
确认起飞检查完成,场地无障碍,可以给飞机动力上电,人员远离飞机。
-
确认地面站软件模式为手动,控制源为RC,打舵检查舵机/舵面执行逻辑是否正确。
-
正确可以准备飞行,根据实际情况选择合适的起飞方式。
-
飞机起飞后,操作遥控器依次让飞机执行左滚、右滚、爬升、俯冲等基础动作,观察飞机舵量的响应表现。
-
飞行速度达到巡航空速附近时,留意飞机在平飞状态下是否需要通过舵偏角来维持稳定飞行;
-
杆量归中短时间看飞机保持高度平飞,以此来判断飞机升降舵是否配平;
-
手动模式飞行状态正常后可以进行后续飞行。
记录飞机转弯时的姿态角、转弯半径以及巡航空速范围等与飞机飞行性能紧密相关的参数。这些参数对于增稳、自主飞行时可以提供参考性。
在手动模式下,飞控系统不参与飞机姿态和空速的控制,因此,必须确认测试飞行人员具备正常操控飞机的能力。若飞机构型特殊或操作环境恶劣,应当尽量缩短飞机在手动模式下的飞行时长,以此降低飞行风险。
注意 :
- 固定翼飞行前请先验证遥控器在远距离时通信状态是否正常。
增稳模式飞行¶
-
模式切换:通过遥控器模式开关切换至 “增稳模式”,手不离开关,做好随时切回手动模式的准备(首次切换易出现不稳定)。
-
成功切换至增稳模式后,若飞机出现某个方向的晃动,可依据具体晃动方向精准调整该方向的感度;
-
当飞机在俯仰方向上出现持续上下波动,或者在横滚方向上呈现左右摇摆的不稳定状态时,可当适当减小对应方向的感度数值;
-
调整过程需遵循循序渐进的原则,每次调整幅度不宜过大,通过不断微调,直至飞机恢复稳定飞行状态。
-
-
姿态稳定后,杆量归中,此时飞机应保持高度平飞,地面站“目标高度”底色变绿;
-
操纵副翼杆,看飞机滚转时是否会保持高度平飞;
-
操纵俯仰杆,发飞机爬升/下降后归中时,高度是否稳定。
-
-
降落后续:检查飞控、电机、电调温度(无过热),记录试飞中出现的问题。
注意 :
- 固定翼飞行前请先验证遥控器在远距离时通信状态是否正常。
自主模式飞行¶
自主模式飞行需要规划航线,详情可参《5.4 航点规划菜单》章节
注意 :
飞控断电后,当前航线信息不会被保存,重新上电时,需要重新上传航线。
控制源为RC¶
遥控器起飞¶
可直接将飞行模式切换到自主模式,飞机将立即响应并进入自主飞行状态,起飞后可以按照预先设定好的航线飞行。
注意 :
由于自主飞行的距离可能较远,遥控器信号存在丢失风险。一旦信号丢失,飞机将自动继续沿着既定航线飞行。在飞行前应充分评估信号覆盖范围和可能出现的干扰因素,确保飞行安全。
地面站起飞¶
将遥控器模式切换开关拨到“自主”档位,在地面站操作界面中,双击“起飞”按钮,飞机将顺利进入自主-起飞状态,起飞后依据设定的航线有序飞行。在操作地面站时,要确保设备连接稳定,数据传输准确,避免因操作失误或设备故障影响飞行。
自主巡航¶
飞机自主起飞后,将按照上传的航点信息进行自主飞行。
飞行操作过程中,需时刻关注飞行器状态、地面站软件回传数据、飞行目标及各设备运行状态,确保飞行器出现异常时能够及时采取处置措施。观察的大概内容包括但不限于:
-
飞机在可视范围内时,检查其飞行姿态是否稳定;
-
通过地面站软件确认目标航点设置正确,且飞行器正向目标航点飞行;
-
检查各传感器及关键设备状态,包括 GPS 定位、电池电压、遥控器信号等是否正常。
注意 :
如果飞行阶段出现任何异常,请及时切换到增稳或者手动模式(超出视距时建议不要切换到手动模式),及时返航并检查问题。如果飞机触发应急操作,请按照相应流程操作。
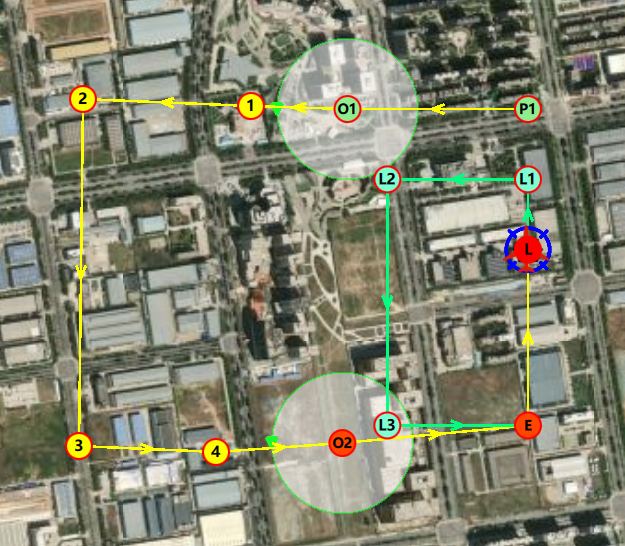
自主降落¶
飞机完成所有航点飞行任务后,将按照预设程序执行自主返航与降落操作,以伞降方式为例,具体流程如下:
飞机首先进入盘旋降高点O2,在该区域进行盘旋飞行,同时逐步降低飞行高度。当高度降至O2航点所设定的高度时,飞机自动转入降落引导点E。在接近降落点的过程中,当飞机与降落点的距离L=滑行系数*转弯半径,并且高度降低至预先设定的降落高度时,会立即关闭动力系统,随后飞机依靠惯性滑行至降落点。在滑行一段时间,即经过设定的开伞延迟时间后,降落伞自动打开,飞机实现安全降落。
若在降落过程中,飞机的高度、距离等条件未能满足上述设定要求,飞机将自动执行复飞操作,再次爬升至合适高度,调整飞行状态,直至高度符合要求且到达指定位置后,再次尝试开伞降落。
控制源为GS¶
地面站双击“启用地面站”,控制源可切换为“GS”。(以弹射机型为例)
-
绘制并上传好飞行航线;
-
完成所有起飞检查项;
-
地面站双击自主,将模式切换到自主模式,然后双击起飞按钮,输出怠速油门,再次双击起飞按钮,输出起飞油门,地面站发射起飞。
提示:
-
弹射架可满油门弹射,也可以怠速油门弹射;
-
发射筒,必须是未启动前弹射。